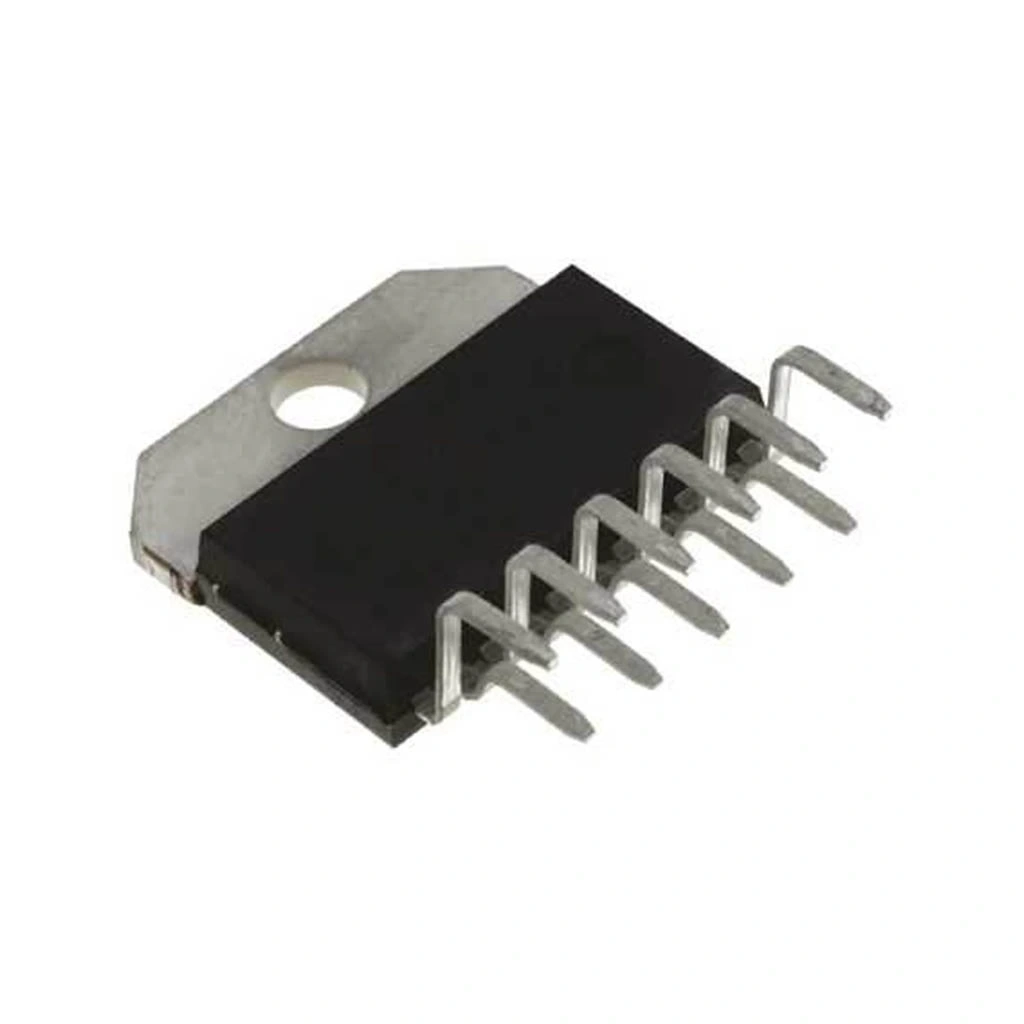
LMD18200 Motor Sürücü Entegresi TO-220-11
LMD18200, yüksek performanslı H-köprü motor sürücü entegresidir. TO-220-11 paketinde sunulan bu güçlü entegre, DC motorları çift yönlü olarak sürebilme kapasitesine sahiptir.
3A sürekli çıkış akımı, 55V maksimum çalışma voltajı ve PWM kontrolü sağlayan bu entegreler, robotik ve endüstriyel motor kontrol uygulamaları için ideal çözüm sunar.
Dahili koruma özellikleri ve geniş çalışma sıcaklığı aralığı ile elektronik komponentler arasında kendine has yeri olan LMD18200, diğer entegreler arasından güvenilirliği ve yüksek performansıyla öne çıkmaktadır.
Teknik Özellikler
LMD18200 Motor Sürücü Entegresi TO-220-11'in detaylı teknik özellikleri aşağıda listelenmiştir.
- Üretici: Texas Instruments (National Semiconductor).
- Sürücü Tipi: H-Köprü Motor Sürücü
- Paket Tipi: TO-220-11 (11 pin),
- Maksimum Çalışma Voltajı: 55V
- Sürekli Çıkış Akımı: 3A
- Tepe Akımı: 6A (kısa süreli)
- RDS(on): 0.33Ω (tipik)
- Çıkış Kanalları: 1 (tek H-köprü)
- PWM Frekansı: 500kHz'e kadar
- Çalışma Sıcaklığı: -40°C ile +125°C arası
- Koruma Özellikleri: Aşırı sıcaklık koruması, kısa devre koruması
- Akım Algılama: Dahili akım sensörü çıkışı
- Fren Modu: Destekler
- Kontrol Girişleri: Yön, Fren, PWM
- Ölü Zaman (Dead Time): Dahili
- Tetikleme Voltajı: TTL/CMOS uyumlu
- Termal Direnci: 3°C/W (junction-to-case)
- Soğutucu Gereksinimi: Yüksek akım uygulamaları için gerekli
- Voltaj Düşümü:< 1.5V (3A'de)
- Bekleme Modu Akımı:< 2mA
- Boyutlar: 19.8mm x 15.2mm x 4.8mm (yaklaşık)
- Ağırlık: 2.3 gram (yaklaşık)
- RoHS Uyumluluğu: Evet
Kullanım Alanları
LMD18200 Motor Sürücü Entegresi'nin kullanılabileceği çeşitli alanlar ve proje örnekleri.
Robotik Uygulamalar
- Robot tekerlekli platformlar
- Robotik kollar ve tutucular
- Çizgi izleyen robotlar
- Savaş robotları
- Araştırma robotları
Endüstriyel Kontrol
- CNC makineleri
- Endüstriyel otomasyon
- Konveyör sistemleri
- Pozisyon kontrol ekipmanları
- Elektrikli valfler ve aktüatörler
Otomotiv Uygulamaları
- Elektrikli pencere sistemleri
- Koltuk pozisyon motorları
- Elektrikli aynalar
- Cam silecek sistemleri
- Fan ve pompa kontrolü
Ev Otomasyonu
- Motorlu perde sistemleri
- Akıllı ev cihazları
- Elektrikli kapı ve pencere mekanizmaları
- HVAC kontrol sistemleri
- Güneş takip sistemleri
Hobi ve DIY Projeleri
- RC araçlar ve modeller
- 3D yazıcılar ve CNC routerlar
- Arduino/Raspberry Pi motor kontrol projeleri
- Elektrikli taşıtlar ve kaykaylar
- Elektronik oyuncaklar
Avantajlar ve Özellikler
LMD18200 Motor Sürücü Entegresi'nin sağladığı avantajlar ve çözümler.
- Yüksek Akım Kapasitesi: 3A sürekli ve 6A tepe akım ile güçlü motorları sürebilme
- Geniş Voltaj Aralığı: 12V-55V arası çalışabilme özelliği
- Dahili Korumalar: Aşırı sıcaklık, kısa devre ve elektromotor kuvveti koruması
- Akım Algılama: Harici devre gerektirmeyen dahili akım sensörü
- Çift Yönlü Kontrol: Entegre H-köprü ile ileri-geri hareket yeteneği
- Düşük Güç Kaybı: Düşük RDS(on) değeri ile verimli çalışma
- Yüksek PWM Frekansı: 500kHz'e kadar hızlı anahtarlama desteği
- Dahili Fren Modu: Hızlı ve kontrollü motor durdurmaya olanak sağlama
- Basit Kontrol Arayüzü: TTL/CMOS uyumlu mantık girişleri
- TO-220 Paketi: Kolay soğutucu montajı ve soğutma verimliliği
Devre Tasarımı ve Uygulama
LMD18200 Motor Sürücü Entegresi'nin devre tasarımı ve uygulaması hakkında detaylar.
İpucu: Bootstrap kapasitörleri ekleyin ve kısa bağlantılarla güç hatları çizin. Kaliteli soğutucu kullanmayı ve termal macun uygulamayı unutmayın.
Paket İçeriği
İlgili Ürün Kategorilerimiz
Çeşitli elektronik komponentler ile projelerinizi ve devrelerinizi geliştirebilirsiniz.
Ürünleri İncele →Farklı fonksiyonlara sahip entegreler ile elektronik projelerinizi geliştirebilirsiniz.
Ürünleri İncele →Özel fonksiyonlu ve çeşitli uygulamalar için tasarlanmış entegreler.
Ürünleri İncele →
Neden Voltaj.Net'ten Almalısınız?
Voltaj.Net, elektronik komponentler ve motor sürücü entegreleri konusunda Türkiye'nin güvenilir tedarikçisidir.
- Kalite Güvencesi: Orijinal ve güvenilir ürünler
- Teknik Destek: Uzman ekip ile çözüm ve danışmanlık
- Teslimat: Stoktan hızlı gönderim imkanı
- Geniş Ürün Yelpazesi: Motor sürücülerden pasif komponentlere tam donanım
- Uygun Fiyatlar: Rekabetçi fiyatlarla kaliteli ürünler
- Güvenilir Alışveriş: Kolay sipariş ve güvenli ödeme seçenekleri
Ürün Hakkında Sıkça Sorulan Sorular
LMD18200 ile ne tür motorlar sürülebilir?
DC fırçalı motorlar, solenoidler ve küçük step motorlar sürülebilir. 3A sürekli ve 6A tepe akım kapasitesi vardır. 55V'a kadar çalışabilir.
TO-220-11 paketi nasıl soğutulmalıdır?
Metal arka yüzeye alüminyum soğutucu monte edilmeli, termal macun kullanılmalı, yüksek akımlarda fan eklenmeli. 3°C/W altında termal dirençli soğutucu önerilir.
PWM frekansı ne kadar olmalıdır?
Genellikle 1kHz-20kHz optimal. Küçük motorlarda 20kHz üzerinde, büyük motorlarda 5kHz altında. Maksimum 500kHz'e kadar destekleniyor.
Fren modu nasıl çalışır?
BRAKE pini HIGH yapıldığında, H-köprünün alt transistörleri aktif olur, motor uçları kısa devre edilerek hızlı frenleme sağlanır.
Akım algılama nasıl kullanılır?
CURRENT SENSE pinine bağlanan direnç üzerinden ölçüm yapılır. 377µA/A oranı ile voltaja dönüşür. ADC ile mikrodenetleyici tarafından okunabilir.
Entegre kendini koruma altına alır mı?
Evet, aşırı sıcaklık koruması (165°C), akım sınırlama ve kısa devre koruması sunar. THERMAL FLAG pini 145°C'de uyarı verir.
Birden fazla motor için nasıl kullanılır?
Her motor için ayrı LMD18200 kullanılır. Diferansiyel sürüş için 2 adet, çok eksenli sistemler için ihtiyaç kadar entegre gerekir.
Neden bootstrap kapasitörü gerekli?
H-köprünün üst MOSFET sürücülerini beslemek için. Her çıkış tarafındaki bootstrap pinlerine 10nF seramik kapasitör bağlanmalıdır.