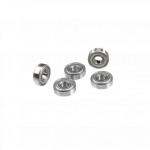
Robot Sarhoş Teker (360 Derece)
Robot Sarhoş Teker, robotik ve hareketli projelerde çok yönlü hareket sağlayan özel bir tekerlek sistemidir. 360 derece dönüş kabiliyeti sayesinde, robotlarınızın her yöne kolayca hareket etmesini sağlar.
Metal gövde ve yüksek kaliteli bilyelerden üretilen bu teker, ağırlık merkezini dengeleyerek robotunuzun düzgün ve akıcı hareket etmesine yardımcı olur. Düşük sürtünme katsayısı ile enerji verimliliği sağlar ve batarya ömrünü uzatır.
Arduino tabanlı robotlar, çizgi izleyen araçlar, mini savaş robotları ve diğer hareketli projeler için ideal olan bu sarhoş teker, kolay montaj özelliğiyle projenize hızlıca entegre edilebilir.
Teknik Özellikler
Robot Sarhoş Tekerinin detaylı teknik özellikleri aşağıda listelenmiştir.
- Tip: 360 derece dönen sarhoş teker
- Malzeme: Metal gövde ve çelik bilye
- Çap: 15mm (Bilye çapı)
- Yükseklik: 22,5mm (toplam)
- Taban Çapı: 29mm
- Taşıma Kapasitesi: Yaklaşık 2.5kg
- Montaj Delikleri: 2 adet, 3mm çapında
- Montaj Deliği Aralığı: 20mm (merkez-merkez)
- Ağırlık: 13g
- Dönüş Açısı: 360 derece (tam dönüş)
- Sürtünme Katsayısı: Düşük
- Yüzey Uyumluluğu: Düz ve sert yüzeylerde en iyi performans
- Montaj Pozisyonu: Genellikle robotun ön veya arka kısmında
- Çalışma Sıcaklığı: -10°C ~ +60°C
- Yağlama: Ön yağlanmış, periyodik bakım gerektirmez
- Uyumluluk: Çoğu standart robot şasisi ile uyumlu
Bağlantı ve Kullanım
Robot Sarhoş Tekerinin montaj ve kullanım talimatları.
İpucu: Sarhoş tekeri, robot platformunun ağırlık merkezi yakınına monte etmek en iyi denge ve performansı sağlar.
Robot Sarhoş Tekerini monte etmek için aşağıdaki adımları izleyin:
- Konum Belirleme: Sarhoş tekeri genellikle iki motor tahrikli tekerleğin ters tarafına monte etmelisiniz. Tipik bir diferansiyel sürüşlü robotta, motorlu tekerlekler arkada ise sarhoş teker öne, motorlu tekerlekler önde ise sarhoş teker arkaya monte edilir.
- Delme: Robot platformunda, montaj delikleri aralığına (20mm) uygun iki delik açın.
- Montaj: Verilen vidaları kullanarak sarhoş tekeri platforma sıkıca sabitleyin. Vidaları aşırı sıkmamaya dikkat edin.
- Denge Kontrolü: Montaj sonrası robotun düz bir zeminde dengeli durduğundan emin olun. Gerekirse robot ağırlığını tekrar dağıtın.
Sarhoş tekeri Arduino tabanlı robotlarda kullanırken, motorlu tekerleklerinizin kontrolünü optimize etmek önemlidir:
- İki tekerlekli diferansiyel sürüş için, modüller kategorisindeki L298N veya L293D motor sürücülerini kullanabilirsiniz.
- Dönüşlerde, dönüş yönündeki tekerleği yavaşlatıp diğerini hızlandırarak daha hassas manevralar elde edebilirsiniz.
- Sarhoş teker üzerindeki aşırı baskıyı önlemek için, robot ağırlığının çoğunluğunun motorlu tekerlekler tarafında olmasına dikkat edin.
Sarhoş tekerin düzenli bakımı için, tekerleğin bilye ve gövdesini toz ve kirden arındırın. Çok kirli ortamlarda kullanım sonrası, hafif bir yağlama yapmak teker ömrünü uzatacaktır.
Uygulama Alanları
Robot Sarhoş Tekerinin kullanılabileceği çeşitli projeler ve uygulama alanları.
Robotik Projeler
- Çizgi izleyen robotlar
- Engelden kaçan robotlar
- Robotik yarışma araçları
- Mini sumo robotları
Eğitim Uygulamaları
- STEM eğitim kitleri
- Robotik eğitim platformları
- Okul projeleri
- Maker atölye çalışmaları
Endüstriyel Kullanım
- Küçük taşıma araçları
- Prototip geliştirme
- Mini AGV sistemleri
- Hobi ve DIY taşıma platformları
Proje Örnekleri
Robot Sarhoş Teker kullanılarak yapılabilecek detaylı proje örnekleri.
Ultrasonik Engel Algılayan Robot
Arduino Uno, L298N motor sürücü, iki adet DC motor, sarhoş teker ve HC-SR04 ultrasonik sensör kullanarak otomatik engel algılayan bir robot yapabilirsiniz. Robotun önüne ultrasonik sensörü monte edin, arka kısmına ise motorlu tekerlekleri yerleştirin. Ön kısma sarhoş tekeri takarak üç nokta teması sağlayın. Arduino programında, ultrasonik sensörden gelen mesafe verilerine göre robotun hareketini kontrol eden bir algoritma yazın.
Robot 20cm'den yakın engel algıladığında durur, geri çekilir ve yeni bir yön seçer. Motorların hızını PWM ile kontrol ederek daha yumuşak hareketler elde edebilirsiniz. Robotun şasisini 3mm pleksiglas veya 3D baskı ile üretebilirsiniz. 9V pil veya lityum batarya ile güç sağlayabilirsiniz. Bu robot, otonom hareket algoritmalarını öğrenmek, sensör entegrasyonu pratik etmek için ideal bir projedir.
Çizgi İzleyen Yarış Robotu
Arduino Nano, iki adet QTR sensör dizisi, iki DC motor, sarhoş teker ve özel tasarlanmış PCB şasi kullanarak hızlı bir çizgi izleyen robot geliştirebilirsiniz. Motorlu tekerlekleri arkaya, sarhoş tekeri öne yerleştirerek alçak profilli bir tasarım elde edin. Sensörleri ön tarafta, motorlu tekerleklerin önünde konumlandırın. PID kontrol algoritması ile çizgi takibi yaparak keskin dönüşlerde bile yoldan çıkmayan bir sistem oluşturun.
Motorların hızını, sensör verilerine göre dinamik olarak ayarlayan bir kod yazın. L293D veya TB6612FNG motor sürücüleri ile verimli motor kontrolü sağlayabilirsiniz. 11.1V LiPo batarya kullanarak yüksek hız elde edebilirsiniz. Sarhoş tekerin düşük sürtünmesi, robotun çizgi üzerinde daha hızlı hareket etmesini sağlayacaktır.
Bu projeyi robotik yarışmalarında kullanabilir veya farklı çizgi izleme algoritmalarını test etmek için platform olarak değerlendirebilirsiniz.
IoT Kontrollü Gözlem Robotu
Arduino Mega, ESP8266 WiFi modülü, iki DC motor, sarhoş teker, servo motor ve kamera modülü kullanarak uzaktan kontrol edilebilen bir gözlem robotu yapabilirsiniz. Arka kısma motorlu tekerlekleri, öne sarhoş tekeri monte edin. Kamera modülünü yüksek bir noktaya, servo motor üzerine yerleştirerek pan-tilt hareketi sağlayın.
ESP8266 modülü ile robotu Wi-Fi üzerinden kontrol edebilir, kamera görüntüsünü cep telefonunuza aktarabilirsiniz. Web arayüzü veya özel bir mobil uygulama ile robotun hareketini ve kamera açısını kontrol edebilirsiniz.
Motorları PWM ile hassas kontrol ederek farklı hızlarda hareket sağlayabilirsiniz. Sisteme pil durum sensörü ve zayıf batarya uyarısı ekleyebilirsiniz. Gövdeyi hafif malzemeden yaparak batarya ömrünü uzatabilirsiniz. Bu robot, ev güvenliği, uzaktan gözlem veya eğitim amaçlı keşif platformu olarak kullanılabilir.
Sorun Giderme ve İpuçları
Robot Sarhoş Teker kullanırken karşılaşılabilecek yaygın sorunlar ve çözüm yöntemleri.
Yaygın Sorunlar ve Çözümleri
- Dengesiz Hareket: Ağırlık dağılımını kontrol edin, motorlu tekerleklere daha fazla ağırlık verin.
- Sarsıntılı İlerleme: Zemini temizleyin, sarhoş tekerin bilyesini temizleyin ve yağlayın.
- Dönüşlerde Takılma: Motor hızlarını optimize edin, dönüş algoritmalarını iyileştirin.
- Tekerin Gevşemesi: Montaj vidalarını düzenli kontrol edin, gerekirse loctite kullanın.
- Yüksek Yüzeylerde Takılma: Daha büyük çaplı bir sarhoş teker kullanın veya şasi yüksekliğini artırın.
Performans İpuçları
- Optimum performans için düz ve temiz yüzeylerde kullanın.
- İki tekerlekli robotlarda, ağırlık merkezini motorlu tekerleklere yakın tutun.
- Hızlı dönüşlerde stabilite için dönüş hızını kademeli değiştirin.
- Teker bilyesine periyodik olarak hafif makine yağı uygulayarak sürtünmeyi azaltın.
- Uzun ömür için robot ağırlığını tekerleğin taşıma kapasitesinin altında tutun.
Paket İçeriği
İlgili Ürün Kategorilerimiz
Arduino geliştirme kartları ile robot projelerinizi hayata geçirebilirsiniz. Arduino Uno, Nano ve Mega kartları robot kontrol projeleri için idealdir.
Ürünleri İncele →Motor sürücüler, sensör modülleri ve diğer robotik bileşenler bu kategoride yer almaktadır. Robotunuzu tamamlayacak tüm modülleri bulabilirsiniz.
Ürünleri İncele →
Neden Voltaj.Net'ten Almalısınız?
Voltaj.Net, elektronik komponent ve geliştirme platformları konusunda Türkiye'nin güvenilir tedarikçisidir.
- Kalite Güvencesi: Test edilmiş ve onaylanmış, güvenilir ürünler
- Teknik Destek: Ürün kullanımı ve projeleriniz konusunda uzman desteği
- Teslimat: Stoktan hızlı gönderim ve takip edilebilir kargo
- Tamamlayıcı Ürünler: Projeleriniz için gerekli tüm elektronik bileşenler
- Uygun Fiyatlar: Kaliteden ödün vermeden rekabetçi fiyatlandırma
- Güvenilir Alışveriş: Kolay sipariş ve iade süreci, güvenli ödeme
Ürün Hakkında Sıkça Sorulan Sorular
Sarhoş teker neden bu isimle anılır?
Sabit bir yönü olmadan serbestçe 360 derece dönebilmesi ve düzensiz hareket edebilmesi nedeniyle sarhoş teker olarak anılır. İngilizcede caster wheel olarak bilinir.
Bir robotta kaç sarhoş teker kullanılmalıdır?
Genellikle 2 motorlu tekerleği olan robotlarda denge için 1 sarhoş teker yeterlidir. Daha büyük veya ağır robotlarda 2 sarhoş teker kullanılabilir.
Sarhoş teker halı gibi yumuşak yüzeylerde çalışır mı?
Yumuşak yüzeylerde verimi düşüktür, bilye batabilir veya takılabilir. Sert ve düz yüzeyler (ahşap, fayans, beton) üzerinde en iyi performansı gösterir.
Sarhoş teker robot şasisine nasıl monte edilir?
Teker tabanındaki iki montaj deliği (20mm aralıklı) kullanılarak vida ile şasiye sabitlenir. Dengeli hareket için doğru konumlandırma önemlidir.
Bu ürün ne kadar ağırlık taşıyabilir?
Yaklaşık 2.5kg ağırlık taşıyabilir. Ancak optimum performans için robot toplam ağırlığınızı bu değerin %70'i civarında tutmanız önerilir.
Sarhoş teker bakım gerektirir mi?
Minimal bakım gerektirir. Kirli ortamlarda kullanıldıktan sonra bilyeyi temizlemek ve ara sıra hafif yağlamak yeterlidir. Aşınma belirtileri görülürse değiştirin.
Motorlu tekerlekler ve sarhoş tekerin konumu önemli midir?
Evet, çok önemlidir. Tipik olarak, sarhoş teker ile motorlu tekerlekler arası mesafe ne kadar uzunsa, dönüşler o kadar kararlı olur.
Sarhoş teker olmadan robot yapılabilir mi?
Evet, dört tekerli tasarımlar, omni tekerlekler veya farklı denge mekanizmaları kullanılabilir. Ancak sarhoş teker, basitliği ve düşük maliyeti nedeniyle tercih edilir.