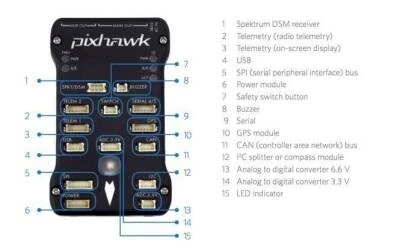
Pixhawk 2.4.8 Uçuş Kontrol Kartı Full Set
Pixhawk 2.4.8 Uçuş Kontrol Kartı Full Set Pixhawk uçuş kontrolörü, hızla gelişen ve rafine edilmiş Ardupilot mega veya 3DR robotikten açık kaynaklı bir proje olan "APM” ye dayanmaktadır. Bu uçuş kontrol cihazı, kullanıcının isteğe bağlı GPS Modülüyle ara noktalarla programlanmış GPS görevlerini bile yerine getirebilen sabit kanatlı, döner kanatlı veya çok kanatlı taşıtları (hatta tekneleri ve arabaları) tamamen otonom bir araca dönüştürmesini sağlar. Otonom stabilizasyon, yol noktası tabanlı navigasyon ve radyo telemetri modülleri ile iki yönlü telemetri için destek sağlayabilen tam bir otopilottur. Pixhawk sisteminin avantajları arasında entegre çoklu kullanım, bir Unix / Linux benzeri programlama ortamı, karmaşık görevler ve uçuş davranışı komutları gibi tamamen yeni otomatik pilot işlevleri ve tüm işlemler arasında sıkı zamanlama sağlayan özel bir PX4 sürücü katmanı bulunur. Bu gelişmiş yetenekler, özerk aracınızla ilgili herhangi bir sınırlama bulunmamasını sağlar. Pixhawk, mevcut APM ve PX4 operatörlerinin sorunsuz bir şekilde bu sisteme geçiş yapmalarını sağlar. Teknik Özellikler Gelişmiş 32-bit ARM CortexM4 yüksek performanslı işlemciler, NuttX RTOS gerçek zamanlı işletim sistemini çalıştırabilir. 14 PWM / servo çıkışı Veriyolu arayüzü (UART, I2C, SPI, CAN) Otomatik ve manuel mod 32bit STM32F427 Cortex M4, FPU ile birlikte 32-bit STM32F103 arızaya dayanıklı ortak işlemci 168 MHz 128 KB RAM 2 MB Flash L3GD20H 16 bit jiroskop X4HBA 303H 14 bit ivmeölçer / manyetometre MPU 6000 3 eksenli ivmeölçer / jiroskop MS5607 barometresi NEO-M8N GPS Modülü Alıcı tipi 72 kanallı Ublox M8 motor GPS / QZSS L1C / A, GLONASS L10F, BeiDou B1 SBAS L1C / A: WAAS, EGNOS, MSAS Galileoya hazır E1B / C (NEO-M8N) Nav. güncelleme hızı1 Tek GNSS: 18 HZ'ye kadar Eş zamanlı GNSS: 10 Hz'e kadar. Konum doğruluğu 2,0 m CEP Duyarlılık İzleme ve Nav: –167 dBm. Soğuk çalıştırma: –148 dBm. Sıcak başlama: –156 dBm. Yardım AssistNow GNSS Çevrimiçi Assist Now GNSS Çevrimdışı (en fazla 35 gün) OMA SUPL ve 3GPP uyumlu Osilatör TCXO (NEO-M8N / Q) Kristal (NEO-M8M) Bellek ROM'u (NEO-M8M / Q) veya Flaş (NEO-M8N) Kilometre sayacı Kat edilen mesafe GPS Tutucu Montaj çubuğu çapı: 4mm Çubuk uzunluğu: 140mm GPS plaka çapı: 40 mm Taban plakası çapı: 35 mm Montaj deliği aralığı: 16-35mm Ağırlık: 20g Renk: Mavi Not: Yapışkan Ped dahil değildir. Cam Elyaf Uçuş Kontrol Cihazı Titreşim Önleyici Amortisör Seti Malzeme: Cam elyaf APM 2.5 / 2.6 / 2.8, KK, MWC ve Pixhawk 2.4 gibi uçuş kontrol üniteleri için uygun Paket Ağırlığı: 24 gr Üst Çerçeve boyutu: 90x60x2 mm Alt Çerçeve Boyutu: 100x70 x2 mm Amortisör Yüksekliği: 10x12 mm Güç Modülü Maksimum giriş voltajı: 28V Maksimum akım algılama: 90A 5V ADC için yapılandırılmış gerilim ve akım ölçümü Anahtarlama regülatörü çıkışı 5,3V ve 3A maks 6 kutuplu DF13 kablosu doğrudan APM 2.5’in ‘PM’ konektörüne takılır 6S pil desteği Paket İçeriği: 1 x Pixhawk PX4 Otopilot PIX 2.4.8 32 Bit Uçuş Kontrolörü 1 x Güç Modülü 1 x GPS Modülü 1 x GPS Tutucu 1 x Buzzer 1 x Ledli Güvenlik Butonu 1 x Mikro SD kart adaptörü 1 x Fiber Uçuş Kontrol Cihazı Titreşim Önleyici Amortisör Seti.