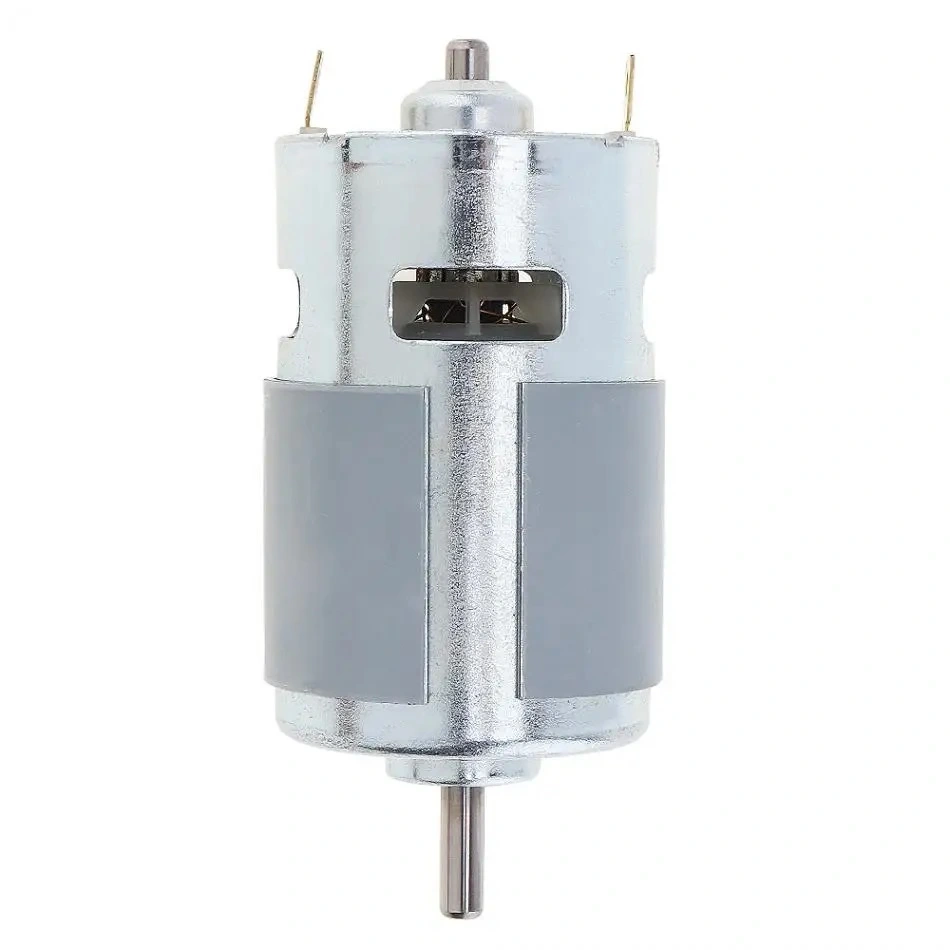
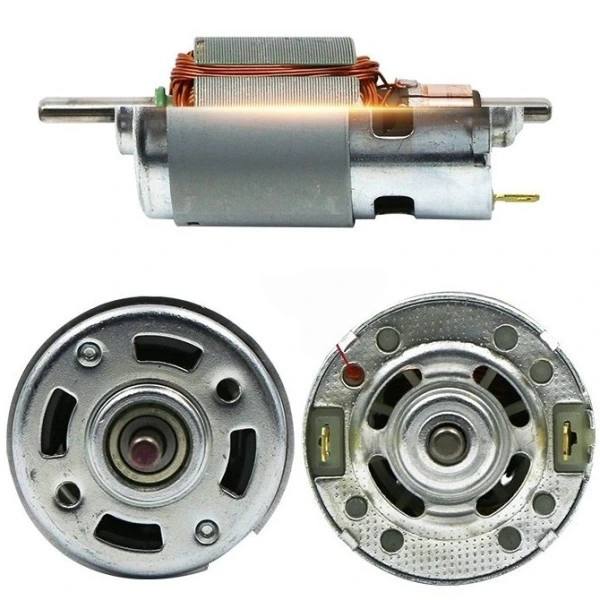
RS775 DC Motor 24V 3000RPM
RS775 DC Motor 24V 3000RPM, yüksek güç ve tork gerektiren robotik, DIY ve mekanik projeler için tasarlanmış endüstriyel kalitede bir DC motordur. 24V çalışma geriliminde 3000 RPM nominal hıza ve etkileyici 200W güç çıkışına sahip olan bu motor, birçok orta-ağır yük uygulaması için ideal bir çözümdür.
Kompakt boyutuna rağmen, çift bilyalı rulman yapısı ve bakır sargıları sayesinde güçlü ve dayanıklı performans sağlayan RS775, robot platformları, elektrikli el aletleri, küçük taşıma sistemleri ve hobi projeleri için mükemmel bir seçenektir.
RS775 DC Motor, hafif ve güçlü tasarımıyla, Arduino kontrollü robotik projeler, CNC makineleri, model araçlar ve daha birçok yaratıcı elektronik projenizde güvenilir bir hareket çözümü sunar.
Teknik Özellikler
Bu bölümde RS775 DC Motorun detaylı teknik özellikleri listelenmektedir.
- Motor Tipi: Fırçalı DC Motor
- Motor Boyutu/Serisi: RS775
- Nominal Voltaj: 24V DC
- Yüksüz Hız (No-Load Speed): Yaklaşık 3000 RPM
- Yüksüz Akım (No-Load Current): Yaklaşık 2.5A
- Duruş Torku (Stall Torque): Yaklaşık 14 kg.cm
- Duruş Akımı (Stall Current): Yaklaşık 34A
- Maksimum Verimlilik: >75%
- Nominal Güç: Yaklaşık 200W
- Rulman Tipi: Çift Bilyalı Rulman
- Redüktör: Yok (Direkt sürüş)
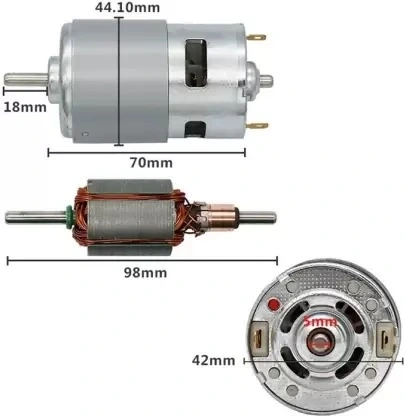
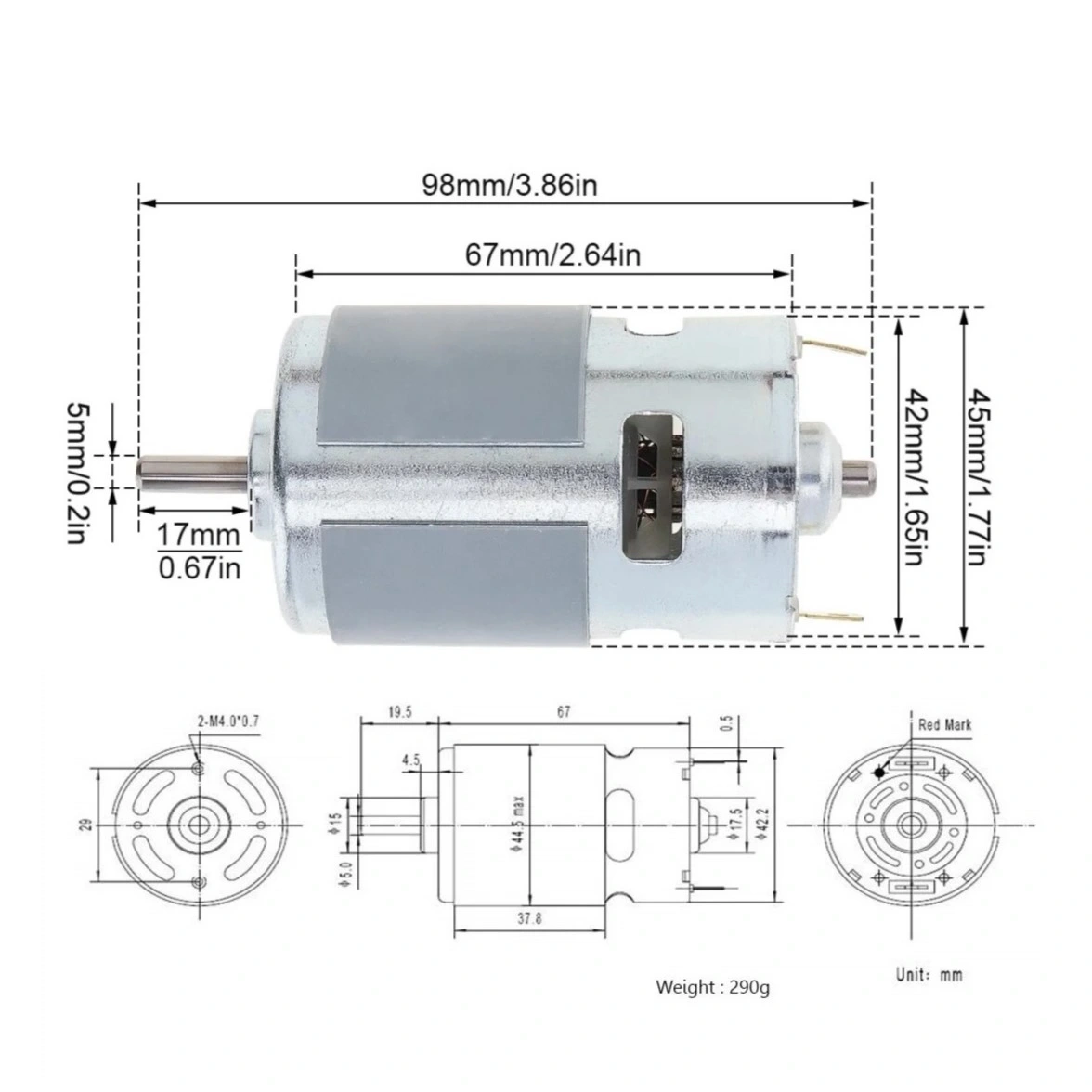
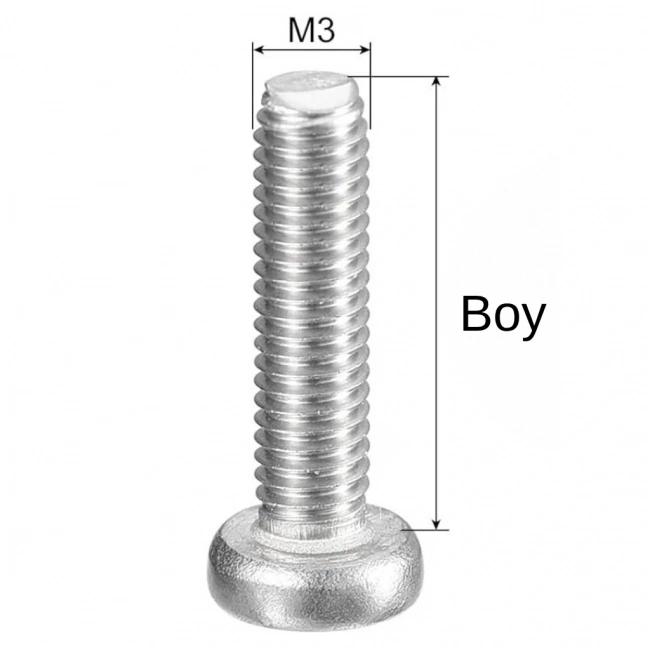
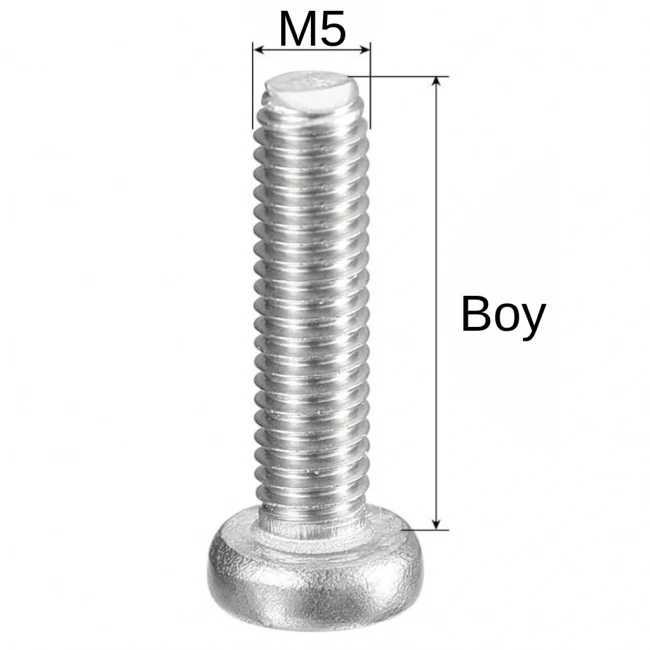
- Şaft Çapı: 5mm
- Şaft Uzunluğu: Yaklaşık 17mm
- Motor Gövde Çapı: Yaklaşık 42mm
- Motor Gövde Uzunluğu: Yaklaşık 78mm (terminal hariç)
- Toplam Uzunluk: Yaklaşık 95mm (şaft ve terminal dahil)
- Ağırlık: Yaklaşık 340g
- Çalışma Sıcaklık Aralığı: -15°C ile +60°C arası
- Terminal Tipi: M4 Vidalı Terminal
- Dönüş Yönü: Voltaj polaritesine bağlı olarak çift yönlü
Kullanım Avantajları
RS775 DC Motorun sağladığı temel avantajlar aşağıda listelenmiştir.
- Yüksek Tork Kapasitesi: Ağır yükleri kolayca hareket ettirebilme yeteneği
- Kompakt Boyut-Güç Oranı: Boyutuna göre etkileyici güç çıkışı (200W)
- Çift Bilyalı Rulman: Uzun ömür ve yüksek radyal yük taşıma kapasitesi
- Dayanıklı Yapı: Metal gövde ile güçlü mekanik dayanıklılık
- Çift Yönlü Çalışma: İleri ve geri hareket için polarite değiştirme imkanı
- Yüksek Verimlilik: >75% verimlilik oranı ile düşük enerji tüketimi
- Geniş Voltaj Aralığı: Nominal 24V olmakla birlikte 12-36V aralığında çalışabilme
- Standart Şaft Boyutu: 5mm şaft ile yaygın kullanılan dişli ve kaplinlere uyum
- Kolay Montaj: Standart M4 montaj delikleri ile basit entegrasyon
- PWM Uyumluluğu: Motor sürücüler ile hız kontrolüne uygun tasarım
İdeal Kullanım Alanları
RS775 DC Motorun tipik kullanım alanları aşağıda listelenmiştir.
Robotik Projeler
Robotik alanında yaygın kullanım örnekleri:
- Mobil Robot Platformları: Ağır yük taşıyabilen gezgin robotlar
- Robotik Kollar: Orta büyüklükte nesneleri kaldırabilen manipülatörler
- Savaş Robotları: Yüksek tork gerektiren rekabetçi robot yarışmaları
- Otomatik Taşıma Robotları: Malzeme taşıma ve lojistik robotları
- Endüstriyel Otomasyon Projeleri: Konveyör ve aktarma sistemleri
DIY ve Hobi Projeleri
Kendin yap ve maker projelerinde kullanım alanları:
- RC Araçlar: Büyük ölçekli uzaktan kumandalı araçlar ve tekne modelleri
- Elektrikli Araç Dönüşümleri: Küçük araçların elektrikli versiyonlara dönüştürülmesi
- Elektrikli Kaykay/Scooter: Kişisel ulaşım araçları için tahrik sistemleri
- DIY Elektrikli El Aletleri: Matkap, şarjlı tornavida, el testeresi yapımı
- Solar Takip Sistemleri: Güneş panellerini güneşi takip etmek için hareket ettiren mekanizmalar
Makine ve Ekipman Uygulamaları
Endüstriyel ve makine uygulamalarındaki kullanım alanları:
- Küçük CNC Makineleri: DIY CNC router ve benzeri makineler
- 3D Yazıcı Ekstruder Sistemleri: Büyük formatlı 3D yazıcılar için
- Otomatik Besleme Sistemleri: Malzeme besleme ve dozajlama üniteleri
- Konveyör Bantları: Küçük ve orta ölçekli taşıma bantları
- Torque Uygulamaları: Yük kaldırma ve döndürme sistemleri
Arduino ve Mikrodenetleyici Projeleri
Elektronik kontrollü projeler için kullanım alanları:
- Akıllı Ev Otomasyonu: Motorlu perde, jaluzi ve kapı sistemleri
- Takip Sistemleri: Kamera pan-tilt sistemleri ve izleme mekanizmaları
- Arduino Kontrollü Araçlar: Sensör tabanlı otonom araçlar
- İnteraktif Sanat Enstalasyonları: Hareket eden sanat projeleri
- Eğitim Amaçlı Mekatronik Sistemler: Robotik ve otomasyon eğitim setleri
Kurulum ve Bağlantı Kılavuzu
RS775 DC Motorun doğru kurulumu ve bağlantısı için detaylı bilgiler.
İpucu: RS775 motorunu projenize entegre ederken, motorun yüksek güç ve akım gereksinimlerini dikkate alın. Motor, doğrudan Arduino veya mikrodenetleyici pinlerinden çalıştırılamaz, mutlaka uygun bir motor sürücü kullanılmalıdır. 24V besleme için güçlü bir güç kaynağı seçin (en az 5A kapasiteli önerilir). İlk kurulumda motor yüksüz durumda test edilmeli, anormal ses veya titreşim olup olmadığı kontrol edilmelidir. Mekanik bağlantı için motorun şaftına aşırı radyal veya eksenel yük uygulamaktan kaçının, bu rulmanların erken aşınmasına neden olabilir. Şaftı dişli veya kapline bağlarken, uygun anahtar veya allen kullanarak vidaları eşit şekilde sıkın. Motor sürücü kartı üzerinde flyback diyot olsa bile, ek koruma için motor terminallerine bir söndürme diyodu (1N5408 veya benzeri) ters paralel bağlanabilir. Motorun gürültü bastırma kapasitörü yoksa, EMI gürültüsünü azaltmak için terminaller arası 0.1uF kapasitör ekleyin. PWM kontrollü uygulamalarda, motorun başlangıç akımını sınırlamak için yumuşak başlatma (soft-start) kodu kullanın. Kurulum sonrası ilk testlerde motorun çektiği akımı mutlaka ölçün, stall (kilitlenme) durumunda akım anormal yükselebilir ve devreye zarar verebilir. Sürekli maksimum güçte çalıştırma durumunda motorun aşırı ısınmasını önlemek için ek soğutma (fan veya alüminyum heatsink) kullanın.
Temel Bağlantı Şeması
Motorun elektriksel bağlantıları için adım adım kılavuz:
- Doğrudan Güç Kaynağı Bağlantısı:
- Motor terminalleri "+" ve "-" ile işaretlenmişse, doğru polariteye göre bağlayın
- İşaretlenmemişse, herhangi bir polarite ile çalışır (polarite yönü dönüş yönünü belirler)
- Minimum 24V, 5A kapasiteli regüle DC güç kaynağı kullanın
- Güç kaynağı ile motor arasına sigorta bağlayın (önerilen: 15-20A)
- Motor Sürücü ile Bağlantı:
- L298N, BTS7960, TB6600 gibi yüksek akım kapasiteli motor sürücüler tercih edin
- Motor sürücünün çıkış pinlerini (genellikle M+ ve M-) motor terminallerine bağlayın
- Motor sürücünün güç girişini uygun voltaj ve akım kapasitesine sahip kaynağa bağlayın
- Mantık voltajı (Vcc) girişini kontrol devresi (Arduino vb.) ile uyumlu seviyeye bağlayın
- Kablo Seçimi ve Bağlantı Yöntemleri:
- Minimum 14 AWG (2mm²) veya daha kalın kablo kullanın
- Bağlantı yerlerini güvenli şekilde izole edin (ısı ile daralan makaron veya elektrik bandı)
- Kablo uzunluğunu mümkün olduğunca kısa tutun (voltaj düşümünü minimumda tutmak için)
- Gevşek bağlantıları önlemek için vidalı terminalleri düzenli aralıklarla kontrol edin
Arduino ile Motor Kontrolü
Arduino veya benzer mikrodenetleyiciler ile RS775 motorunun kontrolü:
- Önerilen Motor Sürücüler:
- L298N: 2A sürekli akım (heatsink ile), çift H-köprü tasarımı
- BTS7960: 43A peak akım kapasitesi, yüksek güçlü uygulamalar için ideal
- TB6600: Mikrostep desteği, 4.5A peak akım kapasitesi
- VNH5019: 30A peak akım, düşük ısınma, entegre akım sensörü
- Temel Arduino Bağlantı Şeması:
- Arduino → Motor Sürücü:
- Arduino 5V → Sürücü VCC (mantık voltajı)
- Arduino GND → Sürücü GND
- Arduino Dijital Pin → Sürücü IN1 (yön kontrolü)
- Arduino Dijital Pin → Sürücü IN2 (yön kontrolü)
- Arduino PWM Pin → Sürücü Enable/PWM (hız kontrolü)
- Güç Kaynağı → Motor Sürücü:
- 24V DC Güç Kaynağı (+) → Sürücü Motor Güç (+)
- 24V DC Güç Kaynağı (-) → Sürücü Motor Güç (-)
- Motor Sürücü → Motor:
- Sürücü Motor Çıkışı A → Motor Terminali 1
- Sürücü Motor Çıkışı B → Motor Terminali 2
- Örnek Arduino Kodu (L298N ile)
Mekanik Montaj
Motorun mekanik olarak projeye entegrasyonu için öneriler:
- Motor Montaj Yöntemleri:
- Motor gövdesindeki M4 montaj delikleri ile doğrudan şasi bağlantısı
- Motor kelepçesi veya montaj braketi kullanımı
- Metal L-braketler ile 90° açılı montaj
- 3D baskı özel motor yuvaları tasarımı
- Şaft Bağlantı Seçenekleri:
- 5mm iç çaplı kaplinler (esnek veya rijit)
- Şafta uygun dişli veya kasnak montajı
- Set vida ile sabitlenen tekerlek göbekleri
- Kama yuvası açılmış şaftlar için kamalı bağlantı
- Titreşim ve Ses İzolasyonu:
- Motor mounts arasına kauçuk ara parçalar yerleştirme
- Titreşim emici silikon pedler kullanımı
- Motor-şasi arasına yaylı izolatörler ekleme
- Rezonansı önlemek için sağlam montaj yapısı oluşturma
Performans Karakteristikleri
RS775 DC Motorun performans özellikleri ve çalışma karakteristikleri.
Voltaj-Hız İlişkisi
Uygulanan voltaja göre motorun hız değişimi ve karakteristiği:
- Nominal Çalışma (24V):
- Yüksüz Hız: ~3000 RPM
- Nominal Yüklü Hız: ~2500 RPM
- Yüksüz Akım: ~2.5A
- Nominal Akım: ~8A (Verimli çalışma bölgesinde)
- Düşük Voltaj Çalışma (12V):
- Yüksüz Hız: ~1500 RPM
- Nominal Yüklü Hız: ~1250 RPM
- Yüksüz Akım: ~1.2A
- Nominal Akım: ~4A
- Tork: Nominal voltajın yaklaşık %50'si
- Yüksek Voltaj Çalışma (36V):
- Yüksüz Hız: ~4500 RPM
- Nominal Yüklü Hız: ~3750 RPM
- Yüksüz Akım: ~3.7A
- Nominal Akım: ~12A
- Tork: Nominal voltajın yaklaşık %150'si
- Not: Kısa süreli kullanım için, uzun süreli kullanımda aşırı ısınma riski
- PWM Kontrolü Altında:
- Doğrusal PWM-Hız ilişkisi (yaklaşık)
- Düşük PWM değerlerinde (<%20) kararsız çalışma olabilir
- PWM frekansı: 20-30kHz idealdir (daha sessiz çalışma için)
- Frekans çok düşükse ses ve titreşim artabilir
Tork ve Yük Kapasitesi
Motorun tork ve yük taşıma karakteristikleri:
- Tork Karakteristiği:
- Duruş Torku (Stall): ~14 kg.cm (24V'da)
- Nominal Çalışma Torku: ~7 kg.cm (verimli çalışma noktasında)
- Maksimum Verimlilik Torku: ~4-5 kg.cm
- Yüksek tork ihtiyacı akım çekişini önemli ölçüde artırır
- Yük-Hız İlişkisi:
- Yük arttıkça hız düşer (doğrusal olmayan ilişki)
- Nominal yükte hız, yüksüz hızın ~%80-85'i civarındadır
- Aşırı yük durumunda motor zorlanır ve akım çekişi yükselir
- Sürekli aşırı yük, motorun ısınmasına ve zarar görmesine neden olabilir
- Mekanik Limitler:
- Radyal Yük Kapasitesi: Çift rulman sayesinde yüksek
- Eksenel Yük: Sınırlıdır, direkt eksenel yüklerden kaçınılmalıdır
- Şaft Torsiyonel Dayanımı: Çelik malzemeden dolayı yüksek
- Anlık aşırı yüklerde motor durdurulmalı, sürekli zorlanmamalıdır
Enerji Verimliliği
Motorun enerji verimliliği ve optimal çalışma koşulları:
- Verimlilik Karakteristiği:
- Maksimum Verimlilik: >%75 (ideal yük ve voltaj koşullarında)
- Verimlilik Noktası: Genellikle nominal torğun %50-60'ında maksimum
- Düşük yük ve çok yüksek yük koşullarında verimlilik düşer
- Yüksüz çalışmada verimlilik düşüktür (enerji ısıya dönüşür)
- Isınma ve Termal Davranış:
- Sürekli çalışmada maksimum gövde sıcaklığı: ~85°C
- Yüksek yükte 15-20 dakika sürekli çalışma limiti (soğutmasız)
- Optimal performans için önerilen gövde sıcaklığı: <60°C
- Aşırı ısınma, motor sargılarına ve mıknatıslara zarar verebilir
- Verimli Kullanım Önerileri:
- Uygulamanın ihtiyacına uygun redüktör kullanarak torku optimize edin
- Yüksek akım gerektiren anlık operasyonları kısa tutun
- Nominal voltajda veya altında çalıştırın
- Yüksüz çalışma süresini minimize edin
- Sürekli çalışma gerektiren uygulamalarda hava akışını sağlayın
Karşılaştırma ve Alternatifler
RS775 DC Motorun diğer motor tipleriyle karşılaştırması ve uygun alternatifler.
Diğer DC Motor Serileri ile Karşılaştırma
RS775'in benzer DC motor serileriyle karşılaştırmalı analizi:
- RS-550 ile Karşılaştırma:
- Boyut: RS-550 daha küçüktür (29mm çap, 55mm uzunluk civarı)
- Güç: RS-550 daha düşük güç sunar (~65-90W)
- Tork: RS-550 yaklaşık %50 daha düşük tork sağlar
- Hız: Nominal hızları benzerdir (3000-5000 RPM aralığında)
- Ağırlık: RS-550 daha hafiftir (~130-150g)
- Kullanım: RS-550 daha hafif yük uygulamaları için uygundur
- RS-795 ile Karşılaştırma:
- Boyut: RS-795 biraz daha büyüktür
- Güç: RS-795 daha yüksek güç sunar (~240-280W)
- Tork: RS-795 yaklaşık %20-30 daha yüksek tork sağlar
- Akım: RS-795 daha yüksek akım çeker, daha güçlü sürücü gerektirir
- Ağırlık: RS-795 daha ağırdır (~400-450g)
- Kullanım: RS-795 daha ağır yük ve endüstriyel uygulamalar için uygundur
- RS-755 ile Karşılaştırma:
- Boyut: RS-755 biraz daha kısadır, çapları benzerdir
- Güç: RS-755 biraz daha düşük güç sunar (~150-180W)
- Tork: Tork değerleri yakındır, RS-775 biraz daha yüksektir
- Hız: RS-755 genellikle daha yüksek RPM değerlerine sahiptir
- Kullanım: RS-755 daha yüksek hız gerektiren uygulamalar için iyidir
- Maliyet: RS-755 genellikle biraz daha ekonomiktir
Farklı Motor Tipleri ile Karşılaştırma
RS775 DC motorun diğer motor teknolojileriyle karşılaştırması:
- Fırçasız DC Motorlar (BLDC):
- Avantajlar: BLDC'ler daha yüksek verimlilik, daha uzun ömür ve daha düşük gürültü sunar
- Dezavantajlar: BLDC'ler daha pahalıdır ve daha karmaşık kontrol elektronikleri gerektirir
- Performans: Benzer boyuttaki BLDC motorlar genellikle daha yüksek tork/ağırlık oranı sağlar
- Kullanım: Hassas pozisyon kontrolü ve uzun süreli çalışma gerektiren uygulamalarda BLDC tercih edilir
- Servo Motorlar:
- Avantajlar:Servo motorlar entegre pozisyon kontrolü sağlar
- Dezavantajlar: Genellikle daha düşük tork ve sürekli rotasyon kısıtlamaları vardır
- Performans: RS775 daha yüksek güç ve tork sunar, servolar ise daha hassas pozisyon sağlar
- Kullanım:Servo motorlar açı kontrolü gerektiren uygulamalarda, RS775 sürekli dönüş ve yüksek güç uygulamalarında idealdir
- Step Motorlar:
- Avantajlar: Step motorlar açık döngü pozisyon kontrolü sağlar
- Dezavantajlar: Düşük RPM'lerde daha etkilidir, adım kaybı yaşanabilir
- Performans: RS775 daha yüksek hız ve verimlilik sunar, step motorlar daha hassas pozisyonlama sağlar
- Kullanım: Step motorlar hassas konum gerektiren CNC gibi uygulamalar için, RS775 ise yüksek hız/tork uygulamaları için idealdir
Redüktörlü Alternatifler
RS775 ile kullanılabilecek redüktör seçenekleri ve redüktörlü alternatifler:
- Redüktör Adaptasyon Seçenekleri:
- Doğrudan bağlantılı planet redüktörler (5mm giriş mili)
- Kaplin aracılığıyla bağlanan dişli kutuları
- Kayış-kasnak sistemi ile hız/tork optimizasyonu
- Özel üretim adaptörlerle farklı redüktör tipleri
- Yaygın Redüktör Oranları ve Etkileri:
- 5:1 Redüksiyon: 600 RPM çıkış, 5x tork artışı (~70 kg.cm)
- 10:1 Redüksiyon: 300 RPM çıkış, 10x tork artışı (~140 kg.cm)
- 20:1 Redüksiyon: 150 RPM çıkış, 20x tork artışı (~280 kg.cm)
- 50:1 Redüksiyon: 60 RPM çıkış, 50x tork artışı (~700 kg.cm)
- Not: Pratikte verimlilik kayıpları nedeniyle ideal çarpandan biraz düşük tork elde edilir
- Hazır Redüktörlü Alternatifler:
- RS775 + 12V 100RPM Redüktör: Yüksek tork, düşük hız gerektiren uygulamalar için
- RS775 + 24V 300RPM Redüktör: Orta seviye tork/hız dengesi uygulamaları için
- RS775 + 12V/24V 30RPM Redüktör: Çok yüksek tork gerektiren uygulamalar için
- Metal Redüktörlü JGB37-555: Alternatif redüktörlü DC motor seçeneği
Proje Örnekleri ve Uygulamalar
RS775 DC Motor kullanılarak gerçekleştirilebilecek çeşitli proje fikirleri.
Robotik Proje Örnekleri
Robotik alanında RS775 motoru kullanılabilecek projeler:
- Ağır Yük Taşıyabilen Robot Platformu:
- 4 adet RS775 motor ile tahrik edilen dayanıklı robot şasisi
- Redüktörlü motorlar ile yüksek tork sağlama
- Motor sürücü olarak çift BTS7960 modülü kullanımı
- Enkoder geri bildirimi ile hassas hız kontrolü
- Batarya paketi olarak 6S LiPo (22.2V) kullanımı
- Robotik Kol Projesi:
- Taban rotasyonu için yüksek torklu redüktörlü RS775
- Eklemler için worm-dişli redüktör kombinasyonları
- İnverter devresi ile motor frenleme kontrolü
- Potansiyometre geri bildirimi ile pozisyon takibi
- Limit switchler ile hareket sınırlama güvenliği
- Robotik Gripper/Tutucu:
- RS775 motor ile yüksek tutuş gücü sağlama
- Lineer vidalı mil mekanizması ile doğrusal hareket
- Akım sensörü ile tutuş gücü kontrolü
- Paralel çene mekanizması tasarımı
- Hızlı tepki için yüksek RPM, düşük redüksiyon oranı
DIY Elektrikli Araç Projeleri
RS775 motor ile elektrikli araç ve taşıma projeleri:
- Elektrikli Kaykay/Scooter:
- 2 adet yüksek torklu RS775 motor (redüktörlü)
- Kayış-kasnak sistemi ile tekerleklere güç aktarımı
- 24V 20Ah Li-ion batarya paketi
- ESC (Electronic Speed Controller) ile hız kontrolü
- Rejeneratif frenleme ile enerji geri kazanımı
- RC Arazi Aracı:
- 4 tekerlek tahrikli sistem (4 adet RS775)
- Diferansiyel mekanizması ile dönüş kontrolü
- Güçlendirilmiş şasi ve süspansiyon sistemi
- 2.4GHz RC alıcı ve verici sistemi
- Su ve toz korumalı motor muhafazası
- Mini Yük Taşıma Arabası:
- İki tekerlekli balans sistemi
- Redüktörlü RS775 motorlar ile yüksek taşıma kapasitesi
- IMU (Gyro+Akselerometre) ile denge kontrolü
- PID kontrol algoritması ile stabilizasyon
- Yük sensörleri ile otomatik tork ayarlama
Arduino ve DIY Makine Projeleri
Arduino kontrollü maker ve DIY makine projeleri:
- Mini CNC Router/Oyma Makinesi:
- X, Y, Z eksenleri için 3 adet RS775 motor
- Vidalı mil sistemi ile hassas pozisyon kontrolü
- TB6600 step motor sürücüler ile mikroadım kontrolü
- Limit switchler ile referans noktası belirleme
- GRBL tabanlı Arduino kontrolü
- Otomatik Besleme Mekanizması:
- Malzeme beslemesi için redüktörlü RS775 motor
- Optik sensörler ile parça pozisyonu algılama
- Programlanabilir besleme hızı ve miktarı
- LCD ekran ile kullanıcı arayüzü
- Farklı malzeme boyutlarına adapte olabilen ayarlanabilir mekanizma
- Otomatik Kamera Slider Sistemi:
- Lineer ray üzerinde kamera hareketi için RS775 motor
- Kayış-kasnak sistemi ile sessiz çalışma
- Time-lapse ve video çekimi için programlanabilir hız profilleri
- Bluetooth kontrol modülü ile uzaktan yönetim
- Endstop sensörleri ile güvenli hareket sınırlaması
Yaratıcı ve Deneysel Projeler
Alışılmışın dışında yaratıcı RS775 motor uygulamaları:
- Kinetik Sanat Enstalasyonu:
- Senkronize hareket eden mekanik heykel parçaları
- Ses dalgalarına tepki veren motor hız kontrolü
- Ağırlık dengeli hareketli kollar ve paneller
- Programlanmış hareket örüntüleri ve koreografi
- Işık sensörleri ile çevresel etkileşim
- Güneş Takip Sistemi (Solar Tracker):
- İki eksenli (azimut ve yükseklik) güneş paneli pozisyonlama
- LDR sensör dizisi ile güneş pozisyonu algılama
- Worm-dişli redüktör ile kendiliğinden kilitlenme özelliği
- Düşük güç tüketimi için aralıklı hareket algoritması
- Hava durumu API entegrasyonu ile otomatik koruma modu
- DIY Elektrik Jeneratörü:
- RS775 motorun jeneratör olarak kullanımı
- El ile çevirme, rüzgar veya su gücü ile tahrik
- Doğrultma devresi ile DC çıkış elde etme
- Akü şarj kontrolörü entegrasyonu
- Voltaj regülatörü ile stabil çıkış sağlama
Sorun Giderme ve Bakım
RS775 DC Motor kullanımında karşılaşılabilecek sorunlar ve çözüm önerileri.
Yaygın Sorunlar ve Çözümleri
Motorun kullanımında sıklıkla karşılaşılan sorunlar ve bunların çözüm yöntemleri:
- Motor Çalışmıyor:
- Olası Neden: Güç kaynağı sorunu, bağlantı hatası, motor arızası
- Çözüm:
- Güç kaynağı voltajını ve polaritesini kontrol edin
- Kablo bağlantılarında kopukluk veya gevşeklik olup olmadığını kontrol edin
- Motor terminallerini direkt güç kaynağına bağlayarak test edin
- Motor sürücünün çalışıp çalışmadığını kontrol edin
- Motor sargılarının direncini ölçerek kısa devre veya kopukluk kontrolü yapın
- Aşırı Isınma:
- Olası Neden: Aşırı yük, sürekli çalışma, voltaj uyumsuzluğu
- Çözüm:
- Motorun çektiği akımı ölçün, nominal değerin çok üzerindeyse yükü azaltın
- Çalışma döngüsünü düşürün, periyodik dinlenme aralıkları ekleyin
- Soğutma fanı veya ısı emici (heatsink) ekleyin
- Nominal voltaj değerlerinde çalıştırın, aşırı voltajdan kaçının
- Redüktör kullanarak motor zorlanmasını azaltın
- Anormal Ses ve Titreşim:
- Olası Neden: Rulman sorunu, şaft eğilmesi, balans bozukluğu
- Çözüm:
- Rulmanları kontrol edin, gerekirse yağlayın veya değiştirin
- Şaftın d&uu