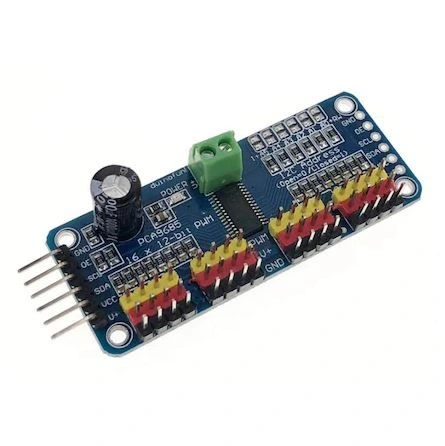
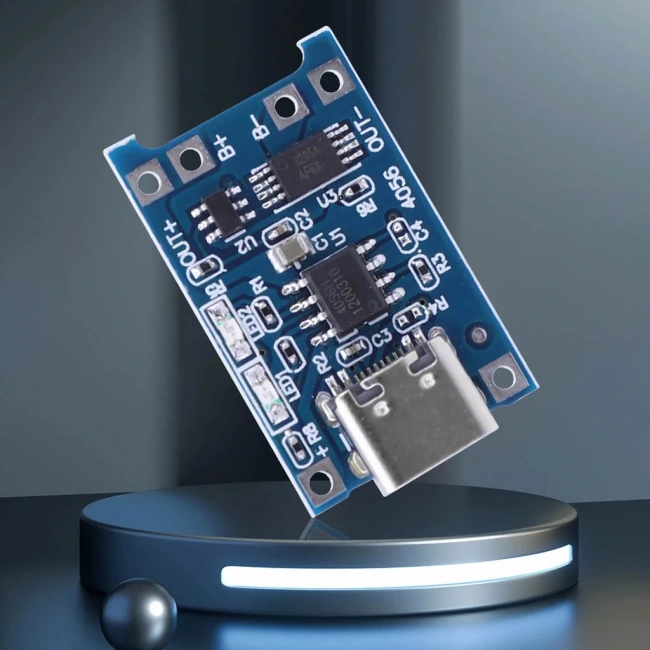
PCA9685 16 Kanal 12-Bit PWM Servo Motor Sürücü Devresi I2C Modülü
PCA9685 16 Kanal 12-Bit PWM Servo Motor Sürücü Devresi I2C Modülü, tek bir mikrodenetleyici ile çok sayıda servo motorun hassas kontrolünü sağlayan kompakt ve güçlü bir sürücü kartıdır. I2C iletişim protokolü ile çalışan bu modül, sadece iki iletişim pini kullanarak 16 adete kadar PWM çıkışını bağımsız olarak kontrol edebilir. 12-bit çözünürlük (4096 adım) sayesinde son derece hassas sinyal kontrolü sağlayan PCA9685, robotik projelerden ışık otomasyonuna kadar geniş bir uygulama yelpazesinde kullanılabilir.
NXP Semiconductors'un PCA9685 entegre devresini temel alan bu sürücü modülü, dahili 25MHz osilatörü ile kararlı PWM sinyalleri üretir. Her kanalın darbe genişliği ve faz kaydırması ayrı ayrı programlanabilir, bu da servo motor kontrolünde esneklik sağlar. Ayrıca I2C adresi, üzerindeki adres atlama pinleri sayesinde değiştirilebilir, böylece aynı I2C veri yoluna 62 adete kadar modül bağlanarak toplam 992 servo motor kontrol edilebilir.
Bu motor sürücü kartı, entegre 5V regülatörü sayesinde harici güç kaynağından doğrudan servolar için gerekli gücü sağlayabilir. Standart servo motorlar için optimize edilmiş bu modül, Arduino, Raspberry Pi ve diğer popüler mikrodenetleyici platformlarıyla kolayca entegre edilebilir. Dahili LED'ler, PWM çıkış durumlarını göstererek hata ayıklama sürecini kolaylaştırır. Geniş çalışma voltaj aralığı (2.3V-5.5V) ve düşük güç tüketimi ile pil ile çalışan projelerde de güvenle kullanılabilir.
Teknik Özellikler
PCA9685 16 Kanal 12-Bit PWM Servo Motor Sürücü Devresi I2C Modülünün detaylı teknik özellikleri aşağıda listelenmiştir.
- Kontrol Entegresi: NXP Semiconductors PCA9685
- Kanal Sayısı: 16 bağımsız PWM çıkışı
- PWM Çözünürlüğü: 12-bit (4096 adım)
- Haberleşme Protokolü: I2C (Two-Wire Interface)
- I2C Adres Aralığı: 0x40 - 0x7F (Adres seçilebilir)
- I2C Frekansı: 100kHz (Standart mod), 400kHz (Hızlı mod), 1MHz (Yüksek hızlı mod)
- Maksimum Modül Sayısı: 62 adet (aynı I2C veri yolunda)
- İşlemci Çalışma Voltajı (VCC): 2.3V-5.5V DC
- Servo Güç Voltajı (V+): 5V-6V DC (ideal servo voltajı)
- Maksimum Çıkış Akımı:
- 25mA (her pin için)
- 400mA (tüm pinler toplam)
- V+ ve VCC Kesici Jumper: Var (güç kaynağı izolasyonu için)
- Dahili Voltaj Regülatörü: 5V, 500mA maksimum
- PWM Frekans Aralığı: 24Hz - 1526Hz
- Varsayılan PWM Frekansı: 60Hz (~50Hz işlemi için ayarlanabilir)
- Darbe Genişliği Aralığı: 0 - 4096 (tam 12-bit çözünürlük)
- Osilatör Frekansı: 25MHz (dahili)
- Servo Sinyal Kontrolü:
- 0.5ms - 2.5ms darbe genişliği (standart servolarda 0°-180°)
- Programlanabilir darbe genişliği ve faz kaydırma
- Çalışma Sıcaklığı: -40°C ile +85°C arası
- Boyutlar: 62.5mm × 25.4mm × 11mm (U×G×Y)
- Montaj Delikleri: 4 adet, 3mm çapında
- LED Göstergeler: PWM çıkış durumu için 16 adet LED
- Güç Göstergesi: Kırmızı LED
- Konektör Tipi:
- 3-pin servo konektörleri (S, V+, GND)
- 4-pin I2C konektörü (VCC, GND, SDA, SCL)
- 2-pin güç girişi (V+, GND)
- Konektör Pin Aralığı: 2.54mm (0.1")
- Adres Seçim Jumperleri: A0, A1, A2, A3, A4, A5
- OE (Output Enable) Pini: Tüm çıkışları etkinleştirme/devre dışı bırakma
- PCB Tipi: FR-4, çift katmanlı
- Ağırlık: Yaklaşık 15g
- Paket İçeriği:
- 1 × PCA9685 16 Kanal Servo Sürücü Kartı
- 1 × 4-pin I2C konnektör kablosu
Özellikler ve Avantajlar
PCA9685 16 Kanal 12-Bit PWM Servo Motor Sürücü Devresi I2C Modülünün sunduğu temel özellikler ve avantajlar.
Çoklu Servo Kontrolü
PCA9685 modülünün çok sayıda servo motoru aynı anda kontrol edebilme yetenekleri:
- 16 Bağımsız Kanal:
- Tek modül ile 16 ayrı servo motoru kontrol edebilme
- Her kanalın bağımsız olarak programlanabilir olması
- Robot kolları ve çok eksenli sistemler için ideal
- Karmaşık animatronik projelere uygunluk
- Genişletilebilir Yapı:
- I2C adres seçimi ile 62 adete kadar modül bağlama imkanı
- Toplam 992 servo motora kadar kontrol edebilme
- Adres jumperları ile kolay konfigürasyon
- Büyük projelere ölçeklenebilir çözüm
- Paralel Hareket Kontrolü:
- Tüm servoları eş zamanlı hareket ettirebilme
- Senkronize hareketler oluşturabilme
- Koordineli animasyonlar programlayabilme
- Düzgün geçişli hareketler sağlama
- Mikrodenetleyici Pini Tasarrufu:
- Sadece 2 pin ile 16 servo kontrolü
- Arduino veya diğer mikrodenetleyicilerin GPIO pinlerinden tasarruf
- Daha karmaşık projeleri daha az pin kullanarak gerçekleştirme
- Diğer sensörler ve modüller için pin kaynağı bırakma
İpucu: PCA9685 servo sürücü modülünüzden maksimum performans almak için birkaç önemli püf noktasına dikkat etmelisiniz. Öncelikle, servolarınız için harici güç kaynağı kullanın - Arduino veya mikrodenetleyicinizin 5V hattı, birden fazla servoya güç sağlamak için yetersiz kalır ve kararsız çalışmaya neden olabilir. 5-6V DC, 2A veya daha yüksek akım kapasiteli bir güç adaptörü ideal olacaktır.
İlgili Ürün Kategorilerimiz
Arduino mikrodenetleyici platformları, geliştirme kartları ve modüller. PCA9685 servo sürücünüzü kolayca kontrol etmek için gereken Arduino kartları ve aksesuarlarını bu kategorimizde bulabilirsiniz. Robotik ve elektronik projeleriniz için geniş Arduino ürün yelpazesi sunuyoruz.
Ürünleri İncele →Çeşitli motor tipleri için sürücü kartları, kontrol modülleri ve aksesuarlar. Step motor sürücülerinden DC motor kontrolörlerine, servo sürücülerden ESC'lere kadar motorlu projeleriniz için gereken tüm sürücü kartları bu kategoride yer almaktadır.
Ürünleri İncele →Robotik projeleriniz için çeşitli boyut ve torklarda servo motorlar. Mikro servolardan yüksek torklu dijital servolara kadar geniş bir ürün yelpazesi sunuyoruz. PCA9685 sürücü kartınızla kontrol edebileceğiniz tüm servo motorlar bu kategoride yer almaktadır.
Ürünleri İncele →
Neden Voltaj.Net'ten Almalısınız?
Voltaj.Net, elektronik komponentler ve modüller konusunda Türkiye'nin güvenilir tedarikçilerinden biri olarak hizmet vermektedir. PCA9685 16 Kanal Servo Motor Sürücü kartını ve diğer elektronik ürünleri tercih etmeniz için sebepler:
- Kalite Güvencesi: Tüm ürünlerimiz test edilmiş ve kalite kontrolden geçmiştir.
- Teslimat: Siparişiniz aynı gün işleme alınır ve en kısa sürede kargoya verilir.
- Teknik Destek: Ürünler hakkında detaylı bilgi ve teknik destek sağlıyoruz.
- Geniş Ürün Yelpazesi: Projeleriniz için ihtiyacınız olan tüm elektronik komponentleri tek bir yerden temin edebilirsiniz.
- Uygun Fiyat: Rekabetçi fiyatlandırma politikamız ile uygun fiyatlı ürünler sunuyoruz.
- Güvenli Alışveriş: SSL korumalı ödeme sistemi ve güvenli alışveriş altyapısı.
- Hobi ve Profesyonel Kullanım: Hem hobi projeleriniz hem de profesyonel uygulamalarınız için uygun ürünler.
- Eğitim Desteği: Öğrenciler ve eğitim kurumları için özel fiyatlandırma ve destek paketleri.
Ürün Hakkında Sıkça Sorulan Sorular
PCA9685 modülü kaç servo motoru kontrol edebilir?
Tek bir PCA9685 modülü 16 adet servo motoru bağımsız olarak kontrol edebilir. I2C adres seçim jumperları kullanılarak, aynı I2C veri yoluna 62 adete kadar modül bağlanabilir, bu da toplam 992 servo motorun kontrol edilebilmesini sağlar.
PCA9685 modülünü Arduino ile nasıl bağlarım?
VCC pinini Arduino 5V veya 3.3V pinine, GND pinini Arduino GND pinine bağlayın. SDA pinini Arduino SDA pinine (UNO: A4, Mega: 20), SCL pinini Arduino SCL pinine (UNO: A5, Mega: 21) bağlayın. Servo güç besleme için harici 5-6V güç kaynağı kullanmanız önerilir.
PCA9685 için gerekli Arduino kütüphanesi hangisidir?
En yaygın kullanılan kütüphane Adafruit PWM Servo Driver kütüphanesidir. Arduino IDE Kütüphane Yöneticisinden veya GitHub üzerinden indirilebilir. Kütüphane, servo kontrolü için kullanıcı dostu fonksiyonlar sunar ve Wire (I2C) kütüphanesi üzerine inşa edilmiştir.
Birden fazla PCA9685 modülünü nasıl kullanabilirim?
Her modülün üzerindeki A0, A1, A2, A3, A4, A5 adres seçim jumperlarını kullanarak farklı I2C adresleri atayın. Tüm modülleri aynı I2C veri yoluna bağlayın. Her modül için ayrı nesne oluşturun ve begin() fonksiyonunda ilgili adresi belirtin.
PCA9685 modülü için gerekli güç kaynağı nedir?
Modülün kendisi 2.3V-5.5V aralığında çalışır. Servo motorların güç kaynağı için 5-6V DC, en az 2A kapasiteli (motorların sayısına ve güç tüketimine bağlı olarak) bir güç kaynağı önerilir. V+ ve VCC arasındaki jumper ile güç besleme seçenekleri ayarlanabilir.
PCA9685 ile LED kontrolü nasıl yapılır?
PWM çıkışları doğrudan LED kontrolü için kullanılabilir. Uygun akım sınırlayıcı direnç ekleyin. setPWM() fonksiyonu ile 0-4095 arası değerler kullanarak parlaklık kontrolü yapabilirsiniz. RGB LED'ler için üç ayrı kanal kullanın. LED'lere uygun PWM frekansı ayarlayın.
Sürekli dönüş servolar PCA9685 ile nasıl kontrol edilir?
Sürekli dönüş servolarda PWM darbe genişliği hızı ve yönü belirler. Genellikle 1.5ms (~307 PWM değeri) durma noktasıdır. Daha düşük değerler bir yöne, yüksek değerler ise diğer yöne dönüşü sağlar. Her servo için durma noktasını hassas şekilde kalibre etmeniz gerekebilir.
PCA9685 modülünde OE (Output Enable) pini ne işe yarar?
OE pini tüm PWM çıkışlarını aynı anda etkinleştirmek veya devre dışı bırakmak için kullanılır. Düşük seviye (LOW) sinyali çıkışları etkinleştirir, yüksek seviye (HIGH) tüm çıkışları devre dışı bırakır. Acil durdurmalar veya güvenlik kesmeleri için kullanışlıdır.