N20 400RPM 6V DC Mikro Metal Redüktörlü Motor
N20 400RPM 6V DC Mikro Metal Redüktörlü Motor, kompakt boyutu ve yüksek tork kapasitesi ile robotik projeler, küçük mekanizmalar ve hassas hareket kontrol uygulamaları için ideal bir çözümdür. Bu mikro motor, endüstriyel kalitede bir DC motor ve dayanıklı metal dişli kutusu kombinasyonu sayesinde güçlü performans ve uzun ömür sunar. Sadece 10x12mm ebatlarındaki kompakt gövdesi, dar alanlara kolayca entegre edilmesini sağlarken, metal dişli sistemi sayesinde 400 RPM hızında bile stabil ve hassas dönüş sağlar.
6V nominal çalışma voltajında 70 mA yüksüz akım çeken bu motor, yüklü durumda 1 kg-cm üzerinde tork üretebilir. Mil ucundaki D şeklindeki çıkış, tekerlek ve diğer mekanik parçaların kolay montajını ve güvenli tork iletimini sağlar. 3V-9V arasında farklı voltajlarda çalışabilme esnekliği ile projenizin güç gereksinimlerine göre hız ve tork değerlerini ayarlayabilirsiniz.
N20 400RPM 6V DC Mikro Metal Redüktörlü Motor, Arduino veya diğer mikrodenetleyici platformları ile kullanılan motor sürücü kartları sayesinde kolay kontrol edilebilir. Servo motorlar kadar hassas açı kontrolü gerektirmeyen ancak daha güçlü tork ve sürekli dönüş ihtiyacı olan mini robot, model araç, kamera pan/tilt sistemleri ve küçük mekatronik mekanizmalar için mükemmel bir seçimdir.
Teknik Özellikler
N20 DC Mikro Metal Redüktörlü Motorun detaylı teknik özellikleri aşağıda listelenmiştir.
- Motor Tipi: Fırçalı DC Motor + Metal Redüktör
- Nominal Voltaj: 6V DC
- Çalışma Voltaj Aralığı: 3V - 9V DC
- Yüksüz Hız: 400 RPM (6V'da).
- Yüksüz Akım: 70 mA (6V'da)
- Zorlanma (Stall) Torku: >1.0 kg-cm
- Zorlanma (Stall) Akımı:<800 mA (6V'da)
- Redüksiyon Oranı: Yaklaşık 1:150
- Gövde Boyutları: 10mm x 12mm x 26mm (Redüktör dahil)
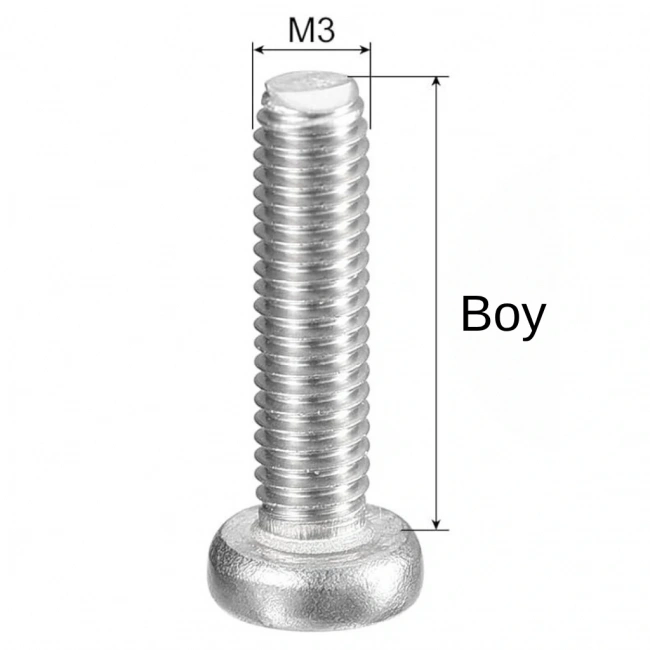
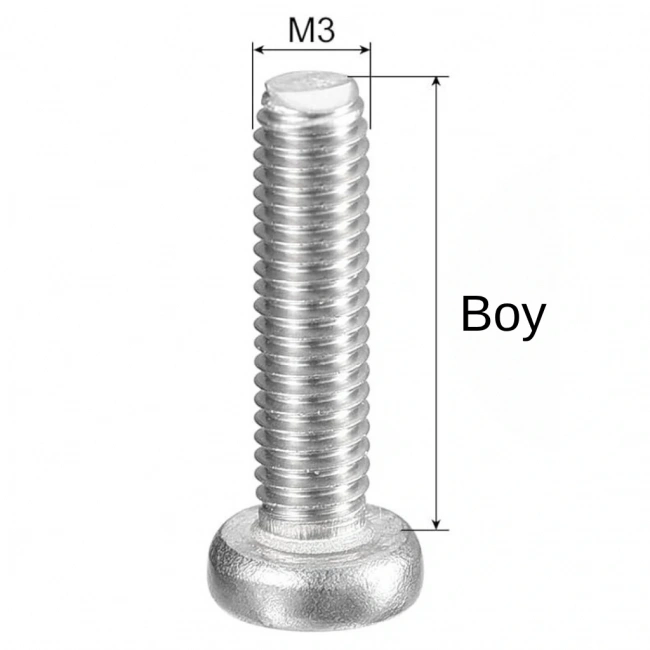
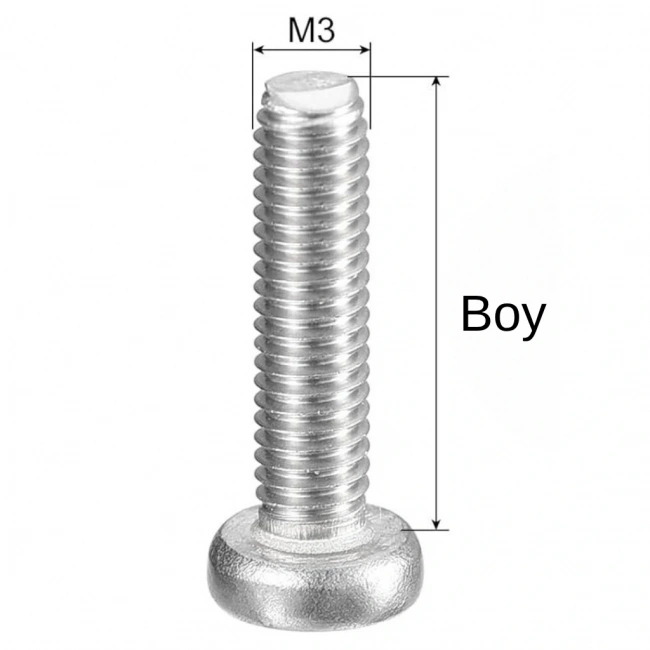
- Mil Çapı: 3mm
- Mil Tipi: D-şaft (bir tarafı düzleştirilmiş)
- Mil Uzunluğu: 9mm
- Ağırlık: Yaklaşık 10 gram
- Bağlantı Tipi: İki kablolu (kırmızı: pozitif, mavi/siyah: negatif)
- Kablo Uzunluğu: Yaklaşık 90mm
- Redüktör Malzemesi: Metal dişli seti
- Çalışma Isısı: -10°C ile +60°C arası
- Tahmini Ömür: >500 saat (nominal yükte)
- Gürültü Seviyesi:<45dB (30cm mesafeden)
- Tersine Çevrilebilir: Evet, polarite değiştirilerek yön kontrolü yapılabilir
- PWM Kontrol Uyumluluğu: Evet, hız kontrolü için PWM kullanılabilir
Bağlantı ve Kullanım
N20 DC motorun çeşitli sistemlere bağlantısı ve kullanım detayları.
İpucu: N20 mikro motorunuzu kullanırken en iyi performans için dikkat edilmesi gereken bazı noktalar vardır. Motor akımlarını güvenli şekilde yönetmek için motor sürücü devreleri kullanılması tavsiye edilir; Ardunio veya diğer mikrodenetleyicilerin I/O pinleri doğrudan motor bağlantısı için yeterli akım sağlayamaz ve hasar görebilir. Yön değişimleri arasında kısa bir duraklama (en az 50ms) bırakarak ani akım yükselmelerini ve olası dişli hasarlarını önleyin. Motoru uzun süre zorlanma (stall) durumunda çalıştırmaktan kaçının; bu durum aşırı ısınmaya ve kalıcı hasara yol açabilir. PWM kontrolünde çok düşük hızlarda motorun düzgün çalışmayabileceğini, minimum %10-15 duty cycle gerektiğini unutmayın.
İlgili Ürün Kategorilerimiz
N20 DC motorlarınızı kontrol etmek için ihtiyacınız olan Arduino kartları ve geliştirme platformları. Uno, Nano, Mega ve diğer Arduino modelleri ile motorlu projelerinizi hayata geçirin ve programlayın. Tüm robotik ve mekatronik projeleriniz için ideal başlangıç noktası.
Ürünleri İncele →N20 mikro DC motorlarınızı verimli şekilde kontrol etmek için L298N, L293D, TB6612FNG gibi sürücü kartları ve modüller. Çift motor kontrolü, hız ayarı, yön kontrolü için tüm ihtiyaçlarınızı karşılayacak profesyonel motor sürücü çözümleri bu kategoride.
Ürünleri İncele →Hassas açı kontrolü gerektiren projeleriniz için alternatif çözümler. N20 DC motorlar sürekli dönüş gerektiren uygulamalar için idealken, servo motorlar belirli açılarda hassas pozisyonlama gerektiren uygulamalar için mükemmel tamamlayıcı ürünlerdir.
Ürünleri İncele →
Neden Voltaj.Net'ten Almalısınız?
Voltaj.Net, elektronik komponent ve robot parçaları konusunda Türkiye'nin güvenilir tedarikçisi olarak kaliteli ürünleri uygun fiyatlarla sunmaktadır.
- Kalite Güvencesi: Test edilmiş ve onaylanmış, orijinal N20 DC motorlar.
- Teknik Destek: Ürün kullanımı ve projeleriniz konusunda uzman desteği.
- Teslimat: Stoktan hızlı gönderim ve takip edilebilir kargo.
- Tamamlayıcı Ürünler: Projeleriniz için gerekli tüm elektronik bileşenler ve mekanik parçalar.
- Uygun Fiyatlar: Kaliteden ödün vermeden rekabetçi fiyatlandırma.
- Güvenilir Alışveriş: Kolay sipariş ve iade süreci, güvenli ödeme seçenekleri.
- Proje Desteği: Blog ve forum ile bilgi paylaşımı, proje rehberleri.
- Adetli Alım
İmkanı: Eğitim kurumları ve büyük projeler için özel fiyatlandırma.
Ürün Hakkında Sıkça Sorulan Sorular
N20 motorun akım çekişi ne kadardır ve hangi sürücü kartları ile kullanılabilir?
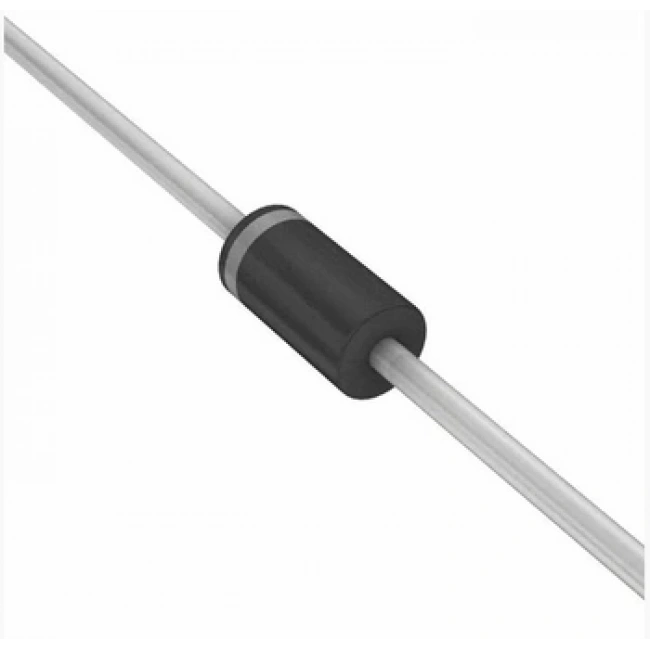
N20 400RPM 6V motor yüksüz durumda yaklaşık 70mA, normal yükte 200-300mA, zorlanma durumunda ise maksimum 800mA akım çeker. L293D, L298N, DRV8833, TB6612FNG gibi yaygın motor sürücü kartları ile güvenle kullanılabilir. L293D 600mA sürekli akım, L298N 2A kadar, TB6612FNG 1.2A, DRV8833 1.5A peak akım destekler. Arduino ile doğrudan sürmeyin, mutlaka sürücü kullanın. Düşük akımlı uygulamalarda tek transistör veya MOSFET ile kontrol mümkündür. Motor koruma için flyback diyot ve filtreleme kapasitörleri kullanılmalıdır. Her durumda sürücünün güç dağıtımı ve soğutma özellikleri dikkate alınmalıdır.
N20 motorun maksimum tork ve hız değerleri nedir?
N20 400RPM 6V modelinin zorlanma torku 1.0 kg-cm üzerindedir (yaklaşık 0.1 Nm). 6V besleme ile nominal hızı 400 RPM, 3V ile yaklaşık 200 RPM, 9V ile yaklaşık 600 RPM elde edilir. Tork ve hız ters orantılıdır; yük arttıkça hız düşer. Optimum çalışma noktası maksimum mekanik güç çıkışının sağlandığı, maksimum torkun yaklaşık %50 seviyesindedir. Verimli çalışma aralığı 350-380 RPM civarında, 0.5-0.7 kg-cm tork değerlerindedir. Düşük voltajda (3V altı) tork yetersiz kalabilir, yüksek voltajda (9V üstü) ısınma ve ömür sorunları yaşanabilir. Redüksiyon oranı yaklaşık 1:150dir.
Arduino ile N20 motorun hız kontrolü nasıl yapılır?
N20 motorun Arduino ile hız kontrolü PWM (Pulse Width Modulation) kullanılarak yapılır. L298N veya L293D gibi motor sürücü kartının enable pinini Arduinonun PWM pinine (3, 5, 6, 9, 10, 11) bağlayın. Motor yönünü sürücünün IN1/IN2 pinleri ile kontrol edin. analogWrite() fonksiyonu ile 0-255 arasında değer göndererek hızı ayarlayın. PWM frekansı varsayılan 490Hz genelde yeterlidir, ancak TimerOne kütüphanesi ile değiştirilebilir. Yüksek frekanslar (8-20kHz) sessiz çalışma sağlar. N20 motorlar genellikle %10-15 altı duty cycle değerlerinde çalışmaya başlayamaz. Hızlanma/yavaşlama için değerleri kademeli değiştirin.
N20 motorun ömrü ne kadardır ve bakımı nasıl yapılır?
N20 motorun tahmini çalışma ömrü normal koşullarda 500 saat üzerindedir. Dayanıklı metal dişli sistemi ve kaliteli rulmanları uzun ömür sağlar. Bakım için 3-6 ayda bir lityum bazlı gres veya sentetik dişli yağı ile redüktör yağlaması yapın. Aşırı ısınmadan korumak için nominal değerlerin üzerinde çalıştırmayın. Kablo bağlantılarını periyodik kontrol edin. Mil kısmında biriken toz ve kirleri yumuşak fırça veya basınçlı hava ile temizleyin. Uzun süre kullanılmayacaksa kuru, tozsuz ortamda saklayın ve terminallere hafif yağ uygulayarak korozyonu önleyin. Motorun ömrünü kısaltan faktörler: aşırı ısınma, aşırı yük, yüksek voltaj, zorlanma durumunda uzun çalıştırma ve mekanik şoklardır.
N20 motor ile N20 servo arasındaki fark nedir?
N20 DC motor ve N20 servo aynı boyutta olsa da farklı özelliklere sahiptir. N20 DC motor sürekli dönüş yapar, yön kontrolü polarite değişimi ile yapılır, hız kontrolü PWM ile sağlanır, pozisyon geri bildirimi yoktur, basit kontrol devresi gerektirir ve daha uygun fiyatlıdır. N20 servo motor ise genelde 180° veya 360° açı sınırı vardır, geri bildirim için dahili potansiyometre bulundurur, hassas pozisyon kontrolü sağlar, standart servo sinyali ile kontrol edilir, dahili sürücü devresi içerir ve genellikle daha pahalıdır. DC motor sürekli dönüş, servo ise hassas pozisyonlama gerektiren uygulamalar için uygundur. Servo motorlar Arduino ile doğrudan Servo kütüphanesi kullanılarak kontrol edilebilir.
N20 motor ile tekerlek veya diğer mekanik parçalar nasıl bağlanır?
N20 motorun D şekilli (bir tarafı düzleştirilmiş) 3mm mili çeşitli şekillerde bağlanabilir: D şekilli deliğe sahip özel tekerlek adaptörleri mil şeklini tam kavrayarak güvenli bağlantı sağlar. Isıyla daralan (heat shrink) tekerlek göbekleri ısıtıldığında mile sıkıca tutunur. Uygun çaplı tekerlek için doğrudan bağlantı yapılabilir, güçlendirmek için epoksi yapıştırıcı kullanılabilir. 3mm-3mm kaplinler ile mile uzatma veya farklı parçalara bağlantı mümkündür. 3D yazıcı ile özel adaptör ve bağlantı parçaları tasarlanabilir. Vidayla sıkıştırmalı hub adaptörleri universale çözüm sunar. Bağlantı yaparken mile aşırı yanal yük bindirmekten kaçının ve mil hizalamasına dikkat edin, bu dişli sistemini korur.
Farklı hızlardaki N20 motor çeşitleri nelerdir ve nasıl seçilir?
N20 motorlar farklı redüksiyon oranlarıyla 30 RPM ile 1000+ RPM arasında çeşitli modellerde üretilir. Düşük hız (30-100 RPM) modelleri yüksek tork gerektiren hassas hareket uygulamaları için idealdir. Orta hız (100-500 RPM) modelleri (400 RPM gibi) en dengeli performansı sunar ve robot platformları için uygundur. Yüksek hız (500-1000 RPM) modelleri daha dinamik hareketler için kullanılır ancak tork düşüktür. Seçim yaparken projenizin tork-hız dengesini değerlendirin. Hız arttıkça tork azalır. Yükün ağırlığı ve hareket direncini hesaplayın. Güç kaynağı kapasitesini ve enerji verimliliği gereksinimlerini göz önünde bulundurun. Kontrol hassasiyeti ihtiyacınıza göre karar verin. Birden fazla motor kullanacaksanız senkronizasyon için aynı modeli tercih edin.
N20 motor ile encoder nasıl kullanılır ve konum kontrolü yapılır?
N20 motorlara konum kontrolü için harici enkoder eklenebilir. Manyetik enkoder için motor miline küçük mıknatıs bağlayıp, Hall sensörü ile dönüşler algılanır. Optik enkoder için mile disk takılıp, IR LED ve foto-transistör ile aralıklar tespit edilir. Enkoder Arduino interrupt pinlerine bağlanarak dönüş sayımı yapılır. İki sensörlü quadrature encoder ile dönüş yönü de belirlenebilir. Enkoder sinyallerinden PWM duty cycle değeri hesaplanarak PID kontrolü uygulanır. Enkoder olmadan konum kontrolü için potansiyometre veya limit switch kullanılabilir. Hassas konum kontrolü için step motor veya servo motor daha uygundur. Enkoder eklemenin mekanik zorlukları vardır, kompakt yapı sınırlama getirir. Bazı hazır N20 enkoder modülleri mevcuttur, ancak standart N20 motorlara göre daha pahalıdır.