Makeblock mBot 6 Bacak Eklenti Paketi
Makeblock mBot 6 Bacak Eklenti Paketi, popüler mBot eğitim robotunuzu çok bacaklı bir insansı robota dönüştürmenizi sağlayan heyecan verici bir genişletme kitidir. Bu set, mBot'unuza 6 programlanabilir bacak ekleyerek yeni hareket kabiliyetleri kazandırır ve klasik tekerlekli platformdan örümcek benzeri bir robota geçiş yapmanıza olanak tanır.
STEM eğitimi odaklı bu kit, öğrencilerin hem mekanik montaj becerilerini hem de programlama yeteneklerini geliştirmelerine yardımcı olur. Hafif ve dayanıklı alüminyum parçalar, servo motorlar ve montaj elemanlarıyla robotunuza yeni bir kişilik kazandırabilir, farklı yürüyüş algoritmaları ve hareket stillerini keşfedebilirsiniz.
Robotik kulüpleri, bilim fuarları ve maker projeleri için ideal olan Makeblock mBot 6 Bacak Eklenti Paketi, tekerlekli bir robotu çok bacaklı bir platforma dönüştürerek öğrencilere biyomimetik robotik kavramlarını keşfetme şansı sunar.
Makeblock mBot 6 Bacak Eklenti Paketi, mBot robotunuzu altı bacaklı bir böceğe dönüştürmek için tasarlanmış bir genişletme kitidir. Bu eklenti, mBot'unuzu daha eğlenceli ve ilginç hale getirirken, öğrencilerin ve hobi kullanıcılarının mekanik yapı ve hareket kontrolü hakkında bilgi sahibi olmalarına yardımcı olur. mBot’un temel özelliklerine yeni işlevler ekleyerek robotik projelerinizde yaratıcılığınızı artırır.
Makeblock mBot 6 bacak eklenti paketi ile mbotunuza 3 adet mbot robot yapabilirsiniz. Bunlar, böcek, peygamber devesi ve çılgın kurbağa yapabilirsiniz.
1. Şekil Beetle :Hızlı hareket edebilen 6 bacaklı böcek.
2. Şekil Mantis(Peygamber Devesi) : Sessizce iki kolunu sallayarak etrafı tarar, karanlığın içinden gelen bir avcı size yaklaşıyor, sizi yakalıyor.... :)
3. Şekil Crazy Frog(Çılgın Kurbağa) : Biraz çılgın bir kurbağa, çok kötüdür ve kimse bunu durduramaz etrafı alt üst eder.
Anahtar Avantajlar:
- Eğitici Değer: Öğrencilere robotik ve mekanik yapıların temel prensiplerini öğretir.
- Kolay Montaj: Basit montaj işlemleri ile hızlı ve kolay kurulum.
- Esneklik ve Uyumluluk: mBot'un mevcut özelliklerine yeni hareket kabiliyetleri ekler.
- Yaratıcılığı Teşvik Eder: Farklı robotik tasarımlar ve projeler oluşturmayı teşvik eder.
- Eğlenceli ve Etkileşimli: mBot'unuzu daha eğlenceli ve etkileşimli bir hale getirir, robotik deneyiminizi zenginleştirir.
Uygulama Alanları:
- Eğitim: Robotik ve STEM eğitim programlarında kullanılabilir.
- Mekanik Tasarım: Öğrencilerin ve hobi kullanıcılarının mekanik tasarım ve montaj becerilerini geliştirmelerine yardımcı olur.
- Hobi ve DIY Projeler: Hobi amaçlı robotik projelerde yaratıcılığı ve problem çözme becerilerini teşvik eder.
- Robot Yarışmaları: Daha ilginç ve farklı robot tasarımları ile yarışmalarda kullanılabilir.
Önemli Not:Ürün içeriğine mBot dahil değildir. Ürünü mBot'unuza sonradan ekleyerek kullanabilirsiniz.
Paket İçeriği
Bu Makeblock mBot 6 Bacak Eklenti Paketinde bulunan tüm bileşenlerin detaylı listesi.
- 6 x Servo Motor: 9g mikro servo motorlar (yürüyüş hareketleri için)
- 1 x Ana Gövde Plakası: mBot'a montaj için özel tasarlanmış ana şasi plakası
- 6 x Bacak Mekanizması: Alüminyum alaşım bacak parçaları
- 12 x Servo Bağlantı Parçası: Servo kollarını bacaklara bağlamak için aparatlar
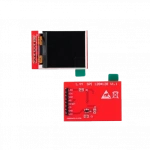
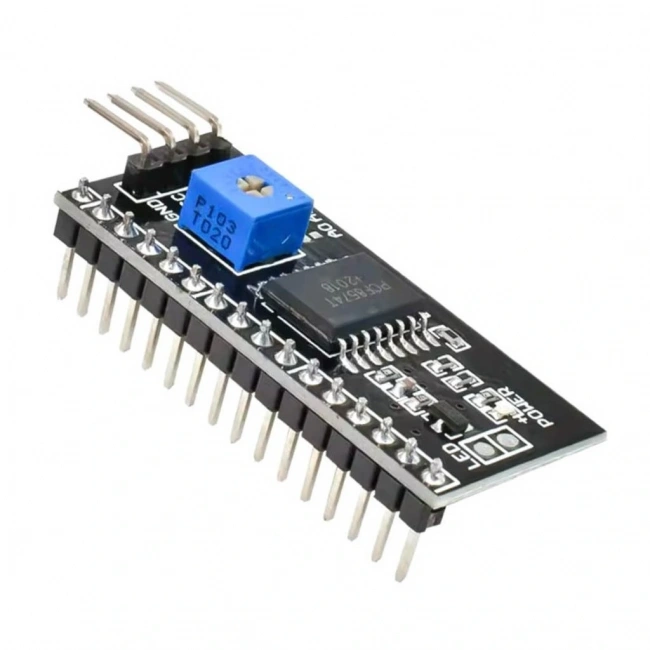
- 1 x Me Servo Sürücü Kartı: 6 servo motoru kontrol edebilen genişletme kartı
- 2 x RJ25 Bağlantı Kablosu: Servo sürücü kartını mBot'a bağlamak için kablolar
- 1 x Güç Dağıtım Kablosu: Servo motorlara güç sağlamak için özel tasarlanmış kablo
- 25 x M3 Vida: Çeşitli boyutlarda montaj vidaları
- 12 x M3 Somun: Bağlantı parçaları için kilitli somunlar
- 1 x M3 Alyan Anahtar: Montaj için gerekli alet
- 1 x Vida Tornavida: Montaj için gerekli alet
- 1 x Adım Adım Montaj Kılavuzu: Detaylı kurulum ve programlama talimatları
- 1 x Örnek Uygulama Kodu: Temel yürüyüş algoritmaları içeren başlangıç kodları
- 6 x Screw M4*8
- 8 x Screw M4*14
- 8 x Screw M4*22
- 4 x Screw M4*30
- 4 x Screw M4*35
- 8 x NutM4
- 16 x Lock Nut M4
- 12 x Plastic Spacer 4*7*10mm
- 14 x Plastic Spacer 4*7*3mm
- 24 x Rivet
- 2 x Beam0412-108-Blue
- 2 x Beam0412-092-Blue
- 6 x Beam0412-076-Blue
- 2 x Beam0412-060-Blue
- 2 x Plate 45°-Blue
- 1 x Wrench M5+M7
Teknik Özellikler
Bu bölümde Makeblock mBot 6 Bacak Eklenti Paketinin detaylı teknik özellikleri listelenmektedir.
- Servo Motor Özellikleri:
- Tip: 9g mikro servo
- Tork: 1.6 kg-cm
- Dönüş Açısı: 180 derece
- Çalışma Voltajı: 4.8V-6V
- Tepki Süresi: 0.12 saniye/60 derece
- Malzeme Özellikleri:
- Ana Gövde Plakası: Anodize alüminyum alaşım
- Bacak Parçaları: Yüksek dayanımlı alüminyum alaşım
- Bağlantı Elemanları: Metal ve ABS plastik
- Boyutlar:
- Montajlı Robot Genişliği: Yaklaşık 17 cm
- Montajlı Robot Uzunluğu: Yaklaşık 15 cm
- Montajlı Robot Yüksekliği: Yaklaşık 8 cm
- Bacak Uzunluğu: Yaklaşık 6 cm (her bir bacak)
- Uyumluluk:
- Tüm mBot 1.1 ve sonrası versiyonlarla uyumlu
- mBot Ranger ile uyumlu (kısmi modifikasyon gerekebilir)
- mCore ve Auriga kontrol kartlarını destekler
- Me Servo Sürücü Kartı Özellikleri:
- Aynı anda 12 servo kontrol edebilme
- Harici güç girişi desteği
- RJ25 Bağlantı
- I2C İletişim protokolü
- Programlama:
- mBlock 5 blok programlama desteği
- Arduino IDE C++ desteği
- Python desteği (Makeblock Python SDK ile)
- Güç Gereksinimleri:
- Tavsiye edilen: 6V 2A güç adaptörü veya 6 adet AA pil
- Harici pil yuvası bağlantısı mevcut
Öğrenme ve STEM Değeri
mBot 6 Bacak Eklenti Paketinin eğitimsel açıdan sağladığı temel değerler.
- Biyomimetik Robotik: Doğadaki canlıların hareket mekanizmalarını taklit eden robotik kavramları öğrenme.
- Mekanik Mühendislik: Karmaşık eklem sistemleri ve hareket mekanizmaları konusunda pratik deneyim.
- Servo Motor Kontrolü: Hassas motor kontrolü ve senkronizasyon ilkelerini kavrama.
- Algoritma Geliştirme: Farklı yürüyüş döngüleri ve hareket sıraları oluşturarak algoritma düşünme becerileri.
- Fizik İlkeleri: Denge, ağırlık merkezi ve kuvvet aktarımı gibi fizik kavramlarını uygulama.
- Programlama Becerileri: Sıralama, zamanlama ve çoklu motor kontrolü için kod yazma.
- Problem Çözme: Optimal yürüyüş paternleri ve engel aşma stratejileri geliştirme.
- Mühendislik Tasarım Süreci: Test, gözlem ve yineleme yoluyla robot performansını optimize etme.
- Disiplinler Arası Öğrenme: Mühendislik, bilgisayar bilimi ve biyoloji alanlarını birleştirme.
- Takım Çalışması: Montaj ve programlama sürecinde işbirliği ve iletişim becerilerini geliştirme.
Kurulum ve Montaj Rehberi
6 bacaklı robot kitinizi doğru şekilde monte etmek için adım adım talimatlar.
İpucu: Montaja başlamadan önce, tüm parçaların eksiksiz olduğunu kontrol edin ve temiz, düz bir çalışma alanı hazırlayın. mBot'un orijinal tekerleklerini ve alt platformu çıkararak temiz bir alt şasi elde edin; bu işlem sırasında elektronik bağlantılara zarar vermemeye dikkat edin. Servo motorların kollarını takmadan önce, tüm servoları orta konuma (90 derece) getirmek için kısa bir test programı çalıştırın; bu, daha sonra doğru hareket aralıklarını programlamayı kolaylaştıracaktır
İlgili Ürün Kategorilerimiz
Projeleriniz için ihtiyacınız olan tüm Arduino kartları ve aksesuarları Voltaj.net'te! Arduino ile robotik projelerinizi daha da geliştirebilirsiniz.
Ürünleri İncele →Çeşitli sensör ve modül seçeneklerimizle projelerinizi geliştirin. Servo kontrol modülleri ve robot bileşenleri için uygun çözümleri bulun.
Ürünleri İncele →
Neden Voltaj.Net'ten Almalısınız?
Voltaj.Net, Türkiye'nin güvenilir elektronik komponent tedarikçisi olarak, eğitim robotik alanında da kaliteli ürünler sunar. Makeblock mBot 6 Bacak Eklenti Paketi, robotik projelerinizi geliştirmek için ideal bir seçenek olarak ürün yelpazemizde yer almaktadır.
- Teslimat: Siparişleriniz aynı gün içinde işleme alınır.
- Orijinal Ürün Garantisi: %100 orijinal Makeblock ürünleri.
- Teknik Destek: Ürünlerin kullanımı konusunda uzman yardımı.
- Uygun Fiyat: Piyasadaki en rekabetçi fiyatlar.
- Geniş Ürün Yelpazesi: Makeblock, Arduino ve robotik projeler için tüm bileşenler.
- Eğitim Kurumlarına Özel: Okullar ve STEM laboratuvarları için toplu alım avantajları.
- Güvenli Alışveriş: SSL korumalı ödeme sistemi ile güvenli ticaret.
- Müşteri Memnuniyeti: Yüksek müşteri memnuniyeti oranı ve kaliteli hizmet.
Ürün Hakkında Sıkça Sorulan Sorular
Bu paketteki servo motorlar ne kadar ağırlık taşıyabilir?
Paketteki 9g mikro servo motorlar 1.6 kg-cm tork üretir. Tüm servo motorlar birlikte çalıştığında yaklaşık 100-150g ağırlığı taşıyabilir. Bu değer, mBot kartı ve pilleri dahil toplam robot ağırlığı için yeterlidir. Servo motorlar sürekli maksimum yükte çalıştırılmamalıdır. Daha ağır yükler için servo motorların yüksek torklu alternatifleriyle değiştirilmesi gerekebilir. İdeal performans için robotun ağırlığını mümkün olduğunca düşük tutun.
Bacakları monte ettikten sonra tekerlekleri kullanabilir miyim?
Hayır, bu kit tekerleklerin yerine kullanılır. 6 bacak eklenti paketi, mBot'un alt şasisini ve tekerleklerini değiştirerek tamamen yeni bir hareket mekanizması kurar. Tekerlekleri ve 6 bacak sistemini aynı anda monte etmek mekanik olarak mümkün değildir. Bazı kullanıcılar hibrit sistemler için özel modifikasyonlar yapmış olsa da, standart montaj buna uygun değildir. Orijinal tekerlekleri saklayın, gerektiğinde kolayca eski haline döndürebilirsiniz.
mBot'un standart pili 6 servo motoru çalıştırmak için yeterli mi?
mBot'un standart pili 6 servo için yeterli değildir. Tüm servolar hareket halindeyken 1.5-2A akım çekebilir, bu mBot'un pil kapasitesini aşar. 6xAA pil paketi veya 7.4V LiPo batarya önerilir. Me Servo sürücü kartı harici güç girişi kullanılmalıdır. Pil zayıfladığında servo performansı düşer, titreme görülebilir. Uzun süreli projeler için 5V 2A güç adaptörü kullanılabilir.
Farklı yürüyüş paternlerini nasıl programlarım?
mBlock yazılımında Me Servo sürücü kartı uzantısını yükleyin. Her servo için açı ve zamanlama değişkenleri tanımlayın. Tripod yürüyüşü için üç bacağı eşzamanlı, diğer üçünü alternatif olarak programlayın. Dalga yürüyüşü için bacakları sırayla hareket ettiren döngüler kullanın. Örnek kodları inceleyip kendi yürüyüş paternlerinizi oluşturun. Servo hareketleri arasında uygun bekleme süreleri ekleyin. Arduino IDE ile daha karmaşık yürüyüş algoritmalarını kodlayabilirsiniz.
Servo motorlar sürekli titriyor, bunu nasıl düzeltebilirim?
Titreme genellikle yetersiz güç kaynağından kaynaklanır. Daha güçlü veya yeni piller kullanın. Me Servo kartı için harici güç kaynağı bağlayın. Servolar mekanik olarak engellenmemiş olmalıdır. Servo açı sınırlarını mekanik limitlerin içinde tutun. Servo bağlantı kablolarının doğru ve sağlam takıldığından emin olun. mBlock kodunda servo pozisyonları arasına uygun gecikmeler ekleyin. Son çare olarak, daha kaliteli servo motorlarla değişim yapabilirsiniz.
Robot düzgün yürümüyor veya dengede duramıyor ne yapmalıyım?
Tüm servo kollarının aynı başlangıç açısında olduğundan emin olun. Bacakların uzunluklarını ve montaj açılarını kontrol edin. Yürüyüş algoritmasındaki zamanlama ve hareket sıralamasını gözden geçirin. Robotun ağırlık merkezini mümkün olduğunca ortaya konumlandırın. Daha yavaş ve kontrollü hareket rutinleri programlayın. Zeminin bacakların kaymasını önleyecek kadar sürtünmeli olduğunu doğrulayın. Başlangıçta tripod gibi daha kararlı yürüyüş paternleri kullanın.
Bu 6 bacak paketini diğer robotik platformlarla kullanabilir miyim?
Evet, adaptasyonlar yaparak diğer platformlarla kullanılabilir. Mekanik bağlantı parçaları Arduino kartlarıyla uyumludur. Servo motorlar standart servo protokollerini kullanır, farklı kontrolcülerle çalışır. Raspberry Pi, ESP32 gibi platformlara servo kütüphaneleri yüklenerek kontrol sağlanabilir. Me Servo kartı yerine PCA9685 gibi alternatif servo sürücüler kullanılabilir. Diğer Makeblock ürünleriyle doğrudan uyumludur. Bazı platformlar için özel adaptör parçaları gerekebilir.
Robot için hangi sensörleri ekleyebilirim?
Ultrasonik sensör ekleyerek engel algılama özellikleri kazandırabilirsiniz. IR sensörlerle uzaktan kumanda kontrolü ekleyebilirsiniz. Işık sensörleri ile ışığa yönelim davranışları programlanabilir. Jiroskop/ivmeölçer ile denge ve eğim algılama yapılabilir. Çizgi izleme sensörü zemin yönlendirmesi sağlar. Sıcaklık sensörleri ile ortam farkındalığı kazandırılabilir. Sonar sensörler gelişmiş ortam haritalama imkanı verir. Kamera modülü görüntü işleme yetenekleri ekler.