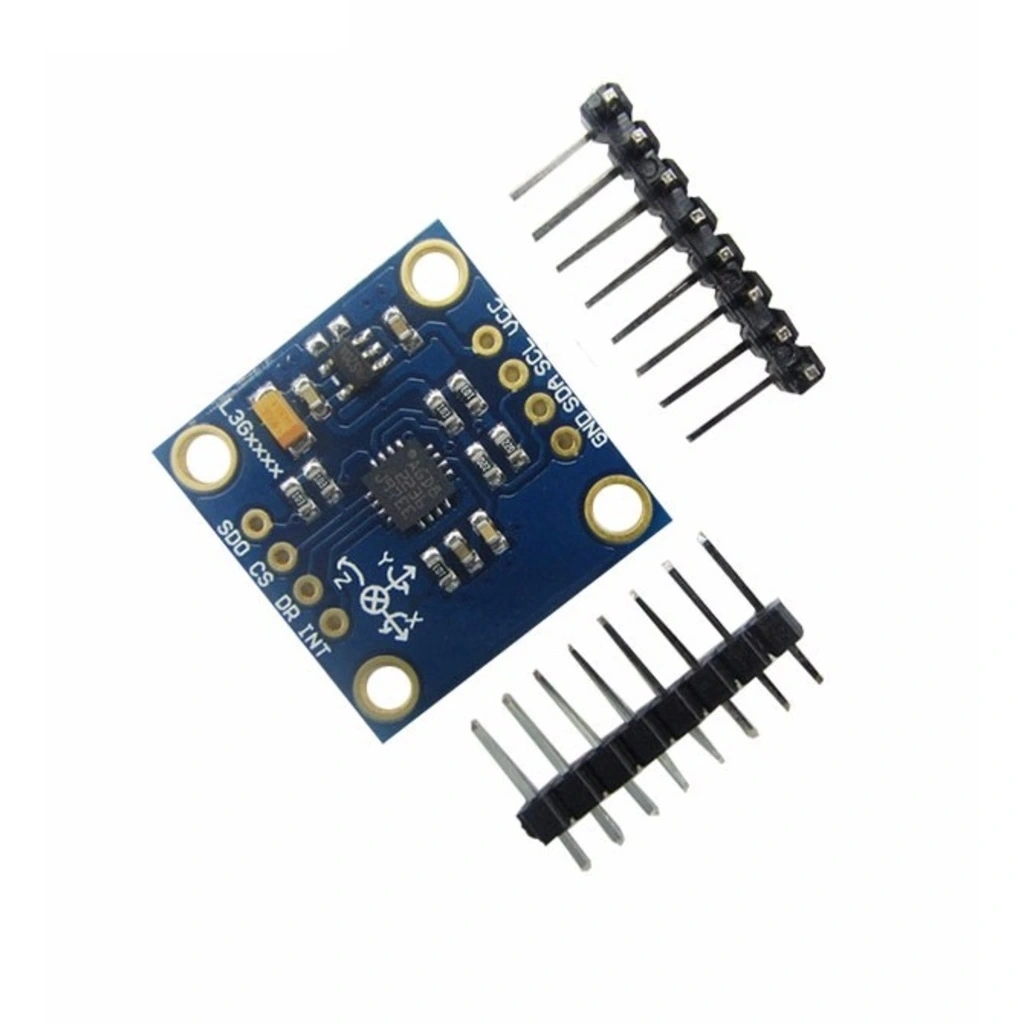
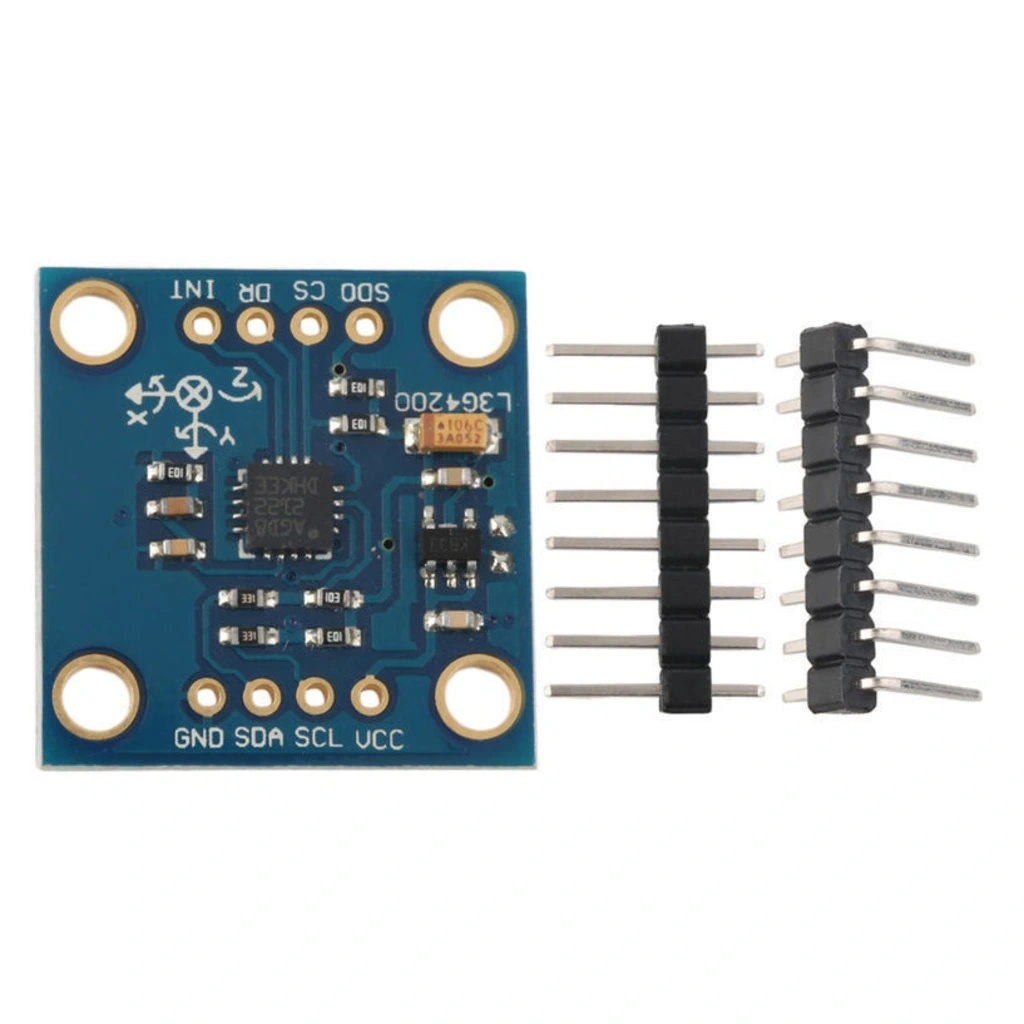
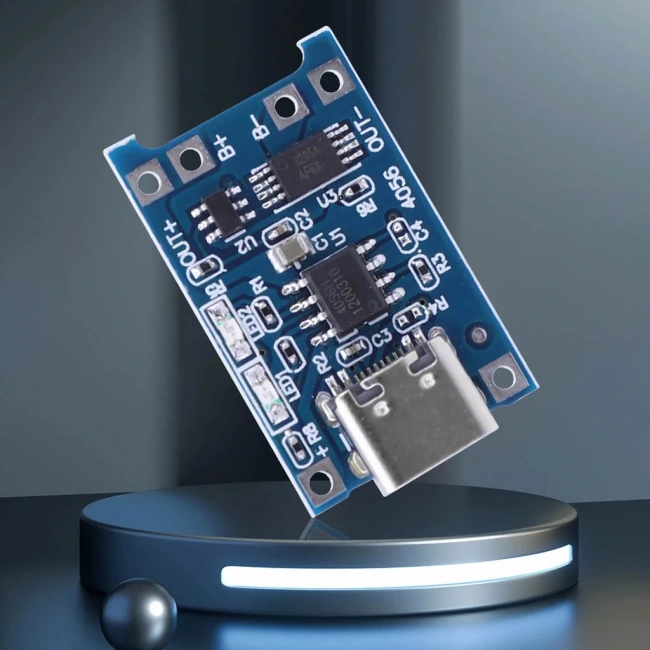
GY-50 L3G4200D 3 Eksen Jiroskop Sensör Modülü
GY-50 L3G4200D 3 Eksen Jiroskop Sensör Modülü, yüksek hassasiyetli açısal hız ölçümü yapabilen kompakt bir sensördür. X, Y ve Z eksenlerinde dönme hareketlerini algılayarak robotik, dengeleme sistemleri ve hareket kontrolü projelerinize hassas veri sağlar. MEMS teknolojisiyle üretilen bu sensör küçük boyutuna rağmen etkileyici performans sunar.
Sensör modülü I2C ve SPI haberleşme protokollerini destekleyerek Arduino ve diğer mikrodenetleyicilerle kolay entegrasyon sağlar. Üç farklı hassasiyet seviyesi (250, 500 ve 2000°/s) ile geniş bir yelpazede ölçüm yapabilir. 16-bit çıkış verisi ve dahili alçak geçiren filtresi sayesinde temiz ve doğru ölçümler elde edebilirsiniz.
GY-50 L3G4200D Jiroskop Sensör Modülü, Arduino ile uyumlu çalışarak insansız hava araçları, dengeli robotlar ve sanal gerçeklik ekipmanları gibi projelerde dönme hareketlerini doğru şekilde ölçmenizi sağlar.
Teknik Özellikler
GY-50 L3G4200D 3 Eksen Jiroskop Sensör Modülünün detaylı teknik özellikleri aşağıda listelenmiştir.
- Sensör Çipi: L3G4200D MEMS jiroskop
- Çalışma Voltajı: 3.3V ~ 5V
- Haberleşme Protokolleri: I2C ve SPI
- I2C Adresi: 0x69 (varsayılan), 0x68 (alternatif)
- Eksen Sayısı: 3 eksen (X, Y, Z)
- Hassasiyet Seçenekleri: ±250, ±500, ±2000°/saniye
- Dijital Çıkış: 16-bit veri çıkışı
- Dahili Filtre: Programlanabilir alçak geçiren filtre
- Örnekleme Hızı: 100Hz, 200Hz, 400Hz, 800Hz seçilebilir
- Çalışma Sıcaklığı: -40°C ~ +85°C
- Güç Tüketimi:6mA (normal mod), 1.5mA (düşük güç modu)
- Kendi Kendine Test: Dahili self-test özelliği
- Kesme (Interrupt) Çıkışı: 2 programlanabilir kesme pini
- Veri İşleme: FIFO tampon belleği (32 seviye)
- Modül Boyutları: 15.5mm × 16mm × 2mm
- Pin Aralığı: 2.54mm standart
- Montaj Delikleri: 2 adet 3mm çapında
Bağlantı ve Kullanım
GY-50 L3G4200D 3 Eksen Jiroskop Sensör Modülünün bağlantısı ve kullanımı ile ilgili bilgiler.
İpucu: GY-50 sensörünü kullanırken, doğru ölçüm için mutlaka sağlam ve titreşimsiz bir montaj yapın. İlk kullanımda kalibrasyonu unutmayın - sensörü sabit tutarak çıkış değerlerinin ortalamasını alıp sıfır noktası olarak kaydedin. I2C haberleşmede pull-up dirençlerinin bağlı olduğundan emin olun, modülde dahili dirençler olsa da uzun kablolarda ek direnç (4.7K-10K) gerekebilir. Elektriksel gürültüyü azaltmak için, sensör yakınında yüksek akım çeken komponentlerden kaçının ve kablo uzunluklarını kısa tutun.
Arduino ile Bağlantı
GY-50 L3G4200D sensör modülünün Arduino ile bağlantı detayları:
- I2C Bağlantısı
- VCC → Arduino 3.3V veya 5V
- GND → Arduino GND
- SDA → Arduino SDA (A4 - UNO/Nano için)
- SCL → Arduino SCL (A5 - UNO/Nano için)
- SDO → Boşta bırakılabilir (I2C adresini belirler)
- SPI Bağlantısı
- VCC → Arduino 3.3V veya 5V
- GND → Arduino GND
- SDA → Arduino MOSI (11)
- SCL → Arduino SCK (13)
- SDO → Arduino MISO (12)
- CS → Arduino dijital pin (örn. 10)
- İsteğe Bağlı Bağlantılar
- INT1 ve INT2 → Arduino dijital pinleri (kesme işlemleri için)
- DRDY → Arduino dijital pin (veri hazır sinyali için)
- Güç Gereksinimleri
- 5V veya 3.3V ile çalışır
- 3.3V ile kullanım daha kararlı sonuçlar verebilir
- Tüketim: ~6mA normal modda
I2C ve SPI Protokolleri
L3G4200D sensörünü iki farklı haberleşme protokolüyle kullanma:
- I2C Protokolü
- Daha az pin gerektiren basit bağlantı
- Varsayılan I2C adresi: 0x69 (SDO yüksek)
- Alternatif adres: 0x68 (SDO düşük)
- Maksimum veri hızı: 400kHz
- SPI Protokolü
- Daha hızlı veri transferi
- 4-tel SPI haberleşmesi (MOSI, MISO, SCK, CS)
- Maksimum veri hızı: 10MHz
- CS pininin düşük seviyesi ile aktifleşir
- Protokol Seçimi
- CS pini yüksek seviyede ise I2C modu aktif
- CS pini düşük seviyede ise SPI modu aktif
- Yüksek hızlı uygulamalar için SPI tercih edilir
Kalibrasyon
GY-50 L3G4200D sensörünün doğru ölçüm yapabilmesi için kalibrasyon prosedürü:
- Sıfır Sapması (Bias) Kalibrasyonu
- Sensörü tamamen hareketsiz tutun
- 100-500 okuma değerinin ortalamasını alın
- Bulunan değerleri sıfır noktası olarak kaydedin
- Ham verilerden bu değerleri çıkararak düzeltme yapın
- Ölçek Kalibrasyonu
- Sensörü bilinen açısal hızlarla döndürün
- Teorik ve ölçülen değerleri karşılaştırın
- Her eksen için düzeltme faktörü belirleyin
- Ham veriyi bu faktörlerle çarparak düzeltin
- Çapraz Eksen Kalibrasyonu
- Bir eksendeki hareketin diğer eksenlere etkisini ölçün
- Çapraz duyarlılık matrisini oluşturun
- Daha hassas uygulamalar için bu matrisi uygulayın
- Sıcaklık Etkisi
- Farklı sıcaklıklarda sensör karakteristiği değişebilir
- Kritik uygulamalarda sıcaklık kompanzasyonu ekleyin
- Dahili sıcaklık sensörünü kullanarak düzeltme yapın
Uygulama Alanları
GY-50 L3G4200D 3 Eksen Jiroskop Sensör Modülünün kullanılabileceği çeşitli projeler ve uygulama alanları.
Robotik Uygulamalar
Jiroskop sensörünün robot projelerinde kullanımı:
- Denge Robotları
- İki tekerlekli kendini dengeleyebilen robotlar
- Inverted pendulum sistemleri
- Segway tipi ulaşım araçları
- Robot Navigasyonu
- Otonom robotlarda dönüş açısı takibi
- Hareket yönünün belirlenmesi
- Odometri verilerinin iyileştirilmesi
- Robot Kol Kontrolü
- Eklem hareketlerinin izlenmesi
- Hassas konumlandırma sistemleri
- Hareket sınırlarının algılanması
- Robot Stabilizasyonu
- Titreşim ve sarsıntıların tespit edilmesi
- Robot platformu dengeleme
- Kamera stabilizasyon sistemleri
Hava Araçları ve Dronlar
Jiroskop sensörünün hava araçlarında kullanımı:
- Uçuş Kontrol Sistemleri
- Dron stabilizasyonu
- Yuvarlanma, yunuslama ve sapma hareketlerinin ölçümü
- Otomatik denge (auto-level) sistemleri
- Gimbal Sistemleri
- Kamera stabilizasyon platformları
- 3-eksen gimbal kontrolü
- Titreşim önleme sistemleri
- Otonom Uçuş Özellikleri
- Yön kontrolü ve navigasyon
- Hover (havada asılı kalma) kontrol sistemleri
- Rota takibi ve otomatik pilotaj
- Model Uçak Stabilizasyonu
- Otomatik denge sistemleri
- Uçuş yardım sistemleri
- Fırtına ve rüzgar dengeleme
Hareket Algılama ve İzleme
Jiroskop sensörünün hareket izleme uygulamaları:
- Giyilebilir Teknolojiler
- Aktivite izleme cihazları
- Spor performans analizi
- Sağlık ve rehabilitasyon sistemleri
- Sanal Gerçeklik
- VR başlık yönelim tespiti
- VR kontrolör takibi
- İmmersif deneyim sistemleri
- Hareket Kontrollü Cihazlar
- Oyun kontrol cihazları
- Jestlerle kontrol edilen sistemler
- Uzaktan kumandalar ve işaretçiler
- Hareket Analizi
- Spor tekniği analizi ve eğitimi
- Biyomekanik araştırmalar
- İnsan hareketi analiz sistemleri
Navigasyon ve Yönelim Sistemleri
Jiroskopun navigasyon ve yönelim belirleme uygulamaları:
- IMU (Inertial Measurement Unit)
- Atalet ölçüm sistemleri
- Yönelim ve konum tespiti
- Ataletsel navigasyon sistemleri
- Araç Navigasyonu
- GPS ile entegre sistemler
- Tünel veya kapalı alanlarda yön tespiti
- Otonom araç yönlendirme
- Denizcilik Uygulamaları
- Küçük deniz araçları stabilizasyonu
- Deniz durumu izleme
- Dümen ve navigasyon sistemleri
- İç Mekan Konumlandırma
- GPS olmayan ortamlarda yön bulma
- Bina içi navigasyon sistemleri
- Acil durum yönlendirme uygulamaları
Örnek Projeler
GY-50 L3G4200D 3 Eksen Jiroskop Sensör Modülü kullanılarak yapılabilecek detaylı proje örnekleri.
İki Tekerlekli Denge Robotu
Jiroskop sensörü kullanarak kendi kendini dengeleyen robot:
- Gerekli Malzemeler
- GY-50 L3G4200D Jiroskop Sensörü
- Arduino Uno/Nano
- İki DC Motor ve Sürücü (L298N)
- Pil veya Güç Kaynağı
- Robot Şasisi ve Tekerlekler
- Çalışma Prensibi
- Jiroskop robota göre eğim açısını ölçer
- PID kontrol algoritması gerekli motor hızını hesaplar
- Robotun düşme yönünün tersine hareket sağlanır
- Sürekli denge kontrolü ile stabil durma sağlanır
- Geliştirme Adımları
- Sensör kalibrasyonu ve filtreleme
- PID parametrelerinin ayarlanması
- Motor kontrol sisteminin kurulması
- Uzaktan kumanda eklenmesi
- Uygulama Alanları
- STEM eğitim projeleri
- Robotik yarışmalar
- Kontrol sistemleri demonstrasyonu
- İleri seviye denge robotu platformları
Kamera Stabilizasyon Gimbal
Jiroskop kullanarak titreşim ve sarsıntıları engelleyen kamera sistemi:
- Gerekli Malzemeler
- GY-50 L3G4200D Jiroskop Sensörü
- Arduino Nano/Micro
- 3 adet Servo Motor (veya BLDC motorlar)
- 3D Baskı Gimbal Parçaları
- Lipo Pil
- Kamera Montaj Aparatı
- Çalışma Prensibi
- Jiroskop kameranın açısal hareketlerini ölçer
- İstenmeyen hareketleri tespit eder
- Servo motorlar ters yönde tepki vererek hareketi dengeler
- Filtre algoritmaları ile hassas kontrol sağlanır
- Geliştirme Adımları
- Mekanik tasarım ve montaj
- Sensör okuma ve filtreleme
- Motor kontrol sisteminin kurulması
- PID parametrelerinin optimizasyonu
- Uygulama Alanları
- Aksiyon kameraları için stabilizasyon
- Düşük bütçeli film çekim ekipmanları
- Drone kamera sistemleri
- Hareket halindeki çekimler
Hareket Kontrollü Oyun Kumandası
Jiroskop sensörüyle hareket algılayan kumanda sistemi:
- Gerekli Malzemeler
- GY-50 L3G4200D Jiroskop Sensörü
- Arduino Micro/Leonardo
- Butonlar ve Anahtarlar
- Li-Po Pil
- 3D Baskı Kumanda Kasası
- Bluetooth Modülü (opsiyonel)
- Çalışma Prensibi
- Jiroskop kumandanın hareketini algılar
- Arduino hareket verilerini bilgisayara/oyun konsoluna aktarır
- Hareket verilerine göre oyun karakteri/araç kontrol edilir
- Butonlar ek kontroller sağlar
- Geliştirme Adımları
- HID (İnsan Arayüz Cihazı) olarak Arduino konfigürasyonu
- Jiroskop veri işleme ve filtreleme
- Ergonomik kumanda tasarımı
- Kablosuz iletişim entegrasyonu
- Uygulama Alanları
- Bilgisayar ve konsol oyunları
- Sanal gerçeklik uygulamaları
- Sunum kontrol cihazları
- Uzaktan kontrollü sistemler
DIY IMU ve Yönelim Sensörü
Jiroskop ve ivmeölçer sensörlerini birleştirerek tam bir IMU sistemi:
- Gerekli Malzemeler
- GY-50 L3G4200D Jiroskop Sensörü
- ADXL345 veya MPU6050 İvmeölçer
- HMC5883L Manyetometre (opsiyonel)
- Arduino Nano/ESP32
- OLED Ekran
- SD Kart Modülü (veri kayıt için)
- Çalışma Prensibi
- Jiroskop açısal hızı ölçer
- İvmeölçer yerçekimi ve doğrusal hareketi algılar
- Manyetometre manyetik kuzey yönünü belirler
- Sensör füzyonu algoritmaları veriyi birleştirir
- Geliştirme Adımları
- Çoklu sensör entegrasyonu
- Kalman veya Mahony filtresi uygulaması
- Quaternion hesaplamaları
- Veri görselleştirme ve kayıt
- Uygulama Alanları
- Ataletsel navigasyon sistemleri
- Hareket analiz cihazları
- Yönelim algılama platformları
- Robotik ve drone projeleri
Sorun Giderme ve Bakım
GY-50 L3G4200D 3 Eksen Jiroskop Sensör Modülü ile ilgili yaygın sorunlar ve çözüm yöntemleri.
Yaygın Sorunlar ve Çözümleri
GY-50 L3G4200D sensörü kullanırken karşılaşılabilecek sorunlar:
- Sürükleme (Drift) Problemi
- Düzenli kalibrasyon yapın
- Daha sık sıfır noktası güncellemesi yapın
- Sensör füzyonu kullanarak (ivmeölçer ile) düzeltin
- Alçak geçiren filtre kullanın
- Haberleşme Sorunları
- I2C adresini doğru ayarladığınızdan emin olun
- Pull-up dirençlerini kontrol edin
- Kablo bağlantılarını ve uzunluklarını kontrol edin
- Alternatif protokol (SPI) deneyin
- Gürültülü Veri
- Dijital filtreleme algoritmaları kullanın
- Mekanik titreşimleri azaltın
- Güç kaynağı gürültüsünü azaltın
- Örnekleme hızını ayarlayın
- Hassasiyet Sorunları
- Doğru ölçüm aralığını ayarlayın
- Sıcaklık kompanzasyonu ekleyin
- Ölçek faktörünü kalibre edin
- Çapraz eksen duyarlılığını düzeltin
Sinyal İşleme ve Filtreleme
Jiroskop verilerini iyileştirmek için sinyal işleme teknikleri:
- Kalman Filtresi
- Gürültü karakteristiğine göre optimum filtreleme
- Gerçek zamanlı veri tahmini yapabilme
- Karmaşık ancak etkili bir filtreleme yöntemi
- İvmeölçer verisiyle birleştirilebilir
- Tamamlayıcı Filtre
- Basit ve etkili filtreleme
- Jiroskop ve ivmeölçer verilerini birleştirme
- Daha az hesaplama gücü gerektirir
- Temel uygulamalar için yeterli
- Hareketli Ortalama Filtresi
- Basit gürültü azaltma
- Son N ölçümün ortalamasını alma
- Kolay uygulanabilir
- Zaman gecikmesi oluşturabilir
- Medyan Filtresi
- Aykırı değerleri etkin şekilde filtreleme
- Anlık gürültü piklerini eleme
- Orta düzey hesaplama gücü gerektirir
- Gerçek zamanlı uygulamalarda kullanılabilir
Sensör Kalibrasyonu İyileştirme
Daha hassas kalibrasyon teknikleri:
- İleri Seviye Statik Kalibrasyon
- Altı yüzeyli kalibrasyon yöntemi
- İstatistiksel analiz ile sapma tespiti
- Allan varyans analizi uygulama
- Sensör füzyon algoritmalarını iyileştirme
- Dinamik Kalibrasyon
- Kontrollü dönme hareketleriyle kalibrasyon
- Referans açısal hızlarla karşılaştırma
- Doğrusallık hatalarını düzeltme
- Çapraz eksen duyarlılığını tespit etme
- Sıcaklık Kompanzasyonu
- Farklı sıcaklıklarda sapma değişimini ölçme
- Sıcaklık-sapma eğrisi oluşturma
- Gerçek zamanlı sıcaklık düzeltmesi uygulama
- Dahili sıcaklık sensörünü kullanma
- Otomatik Kalibrasyon
- Sistem başlangıcında otomatik sıfırlama
- Hareketsiz durumdayken periyodik kalibrasyon
- Adaptif kalibrasyon algoritmaları
- Kullanım sırasında sürükleme tespiti ve düzeltme
Performans Optimizasyonu
GY-50 sensöründen maksimum performans almak için öneriler:
- Donanım Optimizasyonu
- Sensörü titreşimsiz ve sağlam monte edin
- Elektromanyetik gürültü kaynaklarından uzak tutun
- Regüle güç kaynağı kullanın
- Kısa ve kaliteli kablolar tercih edin
- Yazılım Optimizasyonu
- Doğru örnekleme hızını belirleyin
- Sensör okuma zamanlamasını optimize edin
- Veri tamponlama (buffering) teknikleri kullanın
- FIFO özelliğini etkin şekilde kullanın
- Sensör Ayarları Optimizasyonu
- Uygulamaya uygun ölçüm aralığı seçin
- Alçak geçiren filtre bandını ayarlayın
- Güç tasarrufu modlarını etkin kullanın
- Kesme (interrupt) özelliklerini yapılandırın
- Sistem Entegrasyonu
- Diğer sensörlerle kombine ederek performansı artırın
- Farklı veri kaynaklarını birleştirin
- Sensör verilerini asenkron işleyin
- Uygulama seviyesinde hata toleransı ekleyin
İlgili Ürün Kategorilerimiz
GY-50 L3G4200D jiroskop sensörünü kontrol etmek için ihtiyaç duyacağınız Arduino geliştirme kartları ve aksesuarlarına bu kategoriden ulaşabilirsiniz. Sensör projelerinizi hızla geliştirebilmeniz için gerekli tüm Arduino ürünleri burada.
Ürünleri İncele →Projelerinizi tamamlamak için ihtiyaç duyacağınız ivmeölçer, manyetometre, display modülleri ve diğer sensörlere bu kategoriden ulaşabilirsiniz. İMU ve hareket izleme sistemleri için gereken tüm modüller tek yerde.
Ürünleri İncele →
Neden Voltaj.Net'ten Almalısınız?
Voltaj.Net, elektronik komponent ve geliştirme platformları konusunda Türkiye'nin güvenilir tedarikçisi olarak kaliteli ürünleri uygun fiyatlarla sunmaktadır.
- Kalite Güvencesi: Test edilmiş ve onaylanmış, güvenilir sensör modülleri.
- Teknik Destek: Ürün kullanımı ve projeleriniz konusunda uzman desteği.
- Teslimat: Stoktan hızlı gönderim ve takip edilebilir kargo.
- Tamamlayıcı Ürünler: Projeleriniz için gerekli tüm elektronik bileşenler.
- Uygun Fiyatlar: Kaliteden ödün vermeden rekabetçi fiyatlandırma.
- Güvenilir Alışveriş: Kolay sipariş ve iade süreci, güvenli ödeme.
- Proje Desteği: Blog ve forum ile bilgi paylaşımı ve rehberler.
- Adetli Alım
İmkanı: Eğitim kurumları ve büyük projeler için özel fiyatlar.
Ürün Hakkında Sıkça Sorulan Sorular
L3G4200D jiroskop sensörü ne işe yarar?
L3G4200D, 3 eksende (X, Y, Z) açısal hız ölçümü yapan bir MEMS jiroskop sensörüdür. Dönme hareketlerini algılayarak robotik, drone ve hareket izleme projelerinde kullanılır.
GY-50 modülünü Arduino'ya nasıl bağlarım?
I2C bağlantısı için VCC→5V/3.3V, GND→GND, SDA→A4 (UNO), SCL→A5 (UNO) şeklinde bağlayın. SPI için SDA→MOSI, SCL→SCK, SDO→MISO, CS→Dijital pin bağlantısı yapın.
GY-50 jiroskop sensörünün hassasiyet aralıkları nelerdir?
L3G4200D sensörü üç farklı hassasiyet aralığında çalışabilir: ±250°/s, ±500°/s ve ±2000°/s. Yazılım ile bu aralıklar arasında geçiş yapabilirsiniz.
Jiroskop sensöründeki sürükleme (drift) problemi nasıl çözülür?
Düzenli kalibrasyon yapın, alçak geçiren filtre kullanın, sensör füzyon algoritmaları (Kalman, tamamlayıcı filtre) ile ivmeölçer verilerini birleştirin ve sıcaklık kompanzasyonu ekleyin.
L3G4200D sensörünü I2C mi yoksa SPI ile mi kullanmalıyım?
I2C daha az pin gerektirir ve bağlantısı kolaydır. SPI daha hızlı veri transferi sağlar. Yüksek örnekleme hızı gerektiren projeler için SPI, basit uygulamalar için I2C tercih edilebilir.
GY-50 modülünün I2C adresi nedir?
Varsayılan I2C adresi 0x69'dur (SDO pini HIGH iken). SDO pini LOW yapılırsa adres 0x68 olur. I2C tarama kodu ile adres doğrulanabilir.
Jiroskop sensörünün kalibrasyonu nasıl yapılır?
Sensörü hareketsiz bırakın, 100-500 ölçüm alıp ortalamasını hesaplayın. Bu offset değerlerini saklayıp ham verilerden çıkararak kalibre edilmiş veri elde edin.
GY-50 modülü ile ölçülen açılar nasıl hesaplanır?
Jiroskop açısal hızı ölçer. Açıyı hesaplamak için, açısal hızı zamana göre entegre etmelisiniz. Açı = önceki_açı + (açısal_hız × zaman_farkı).