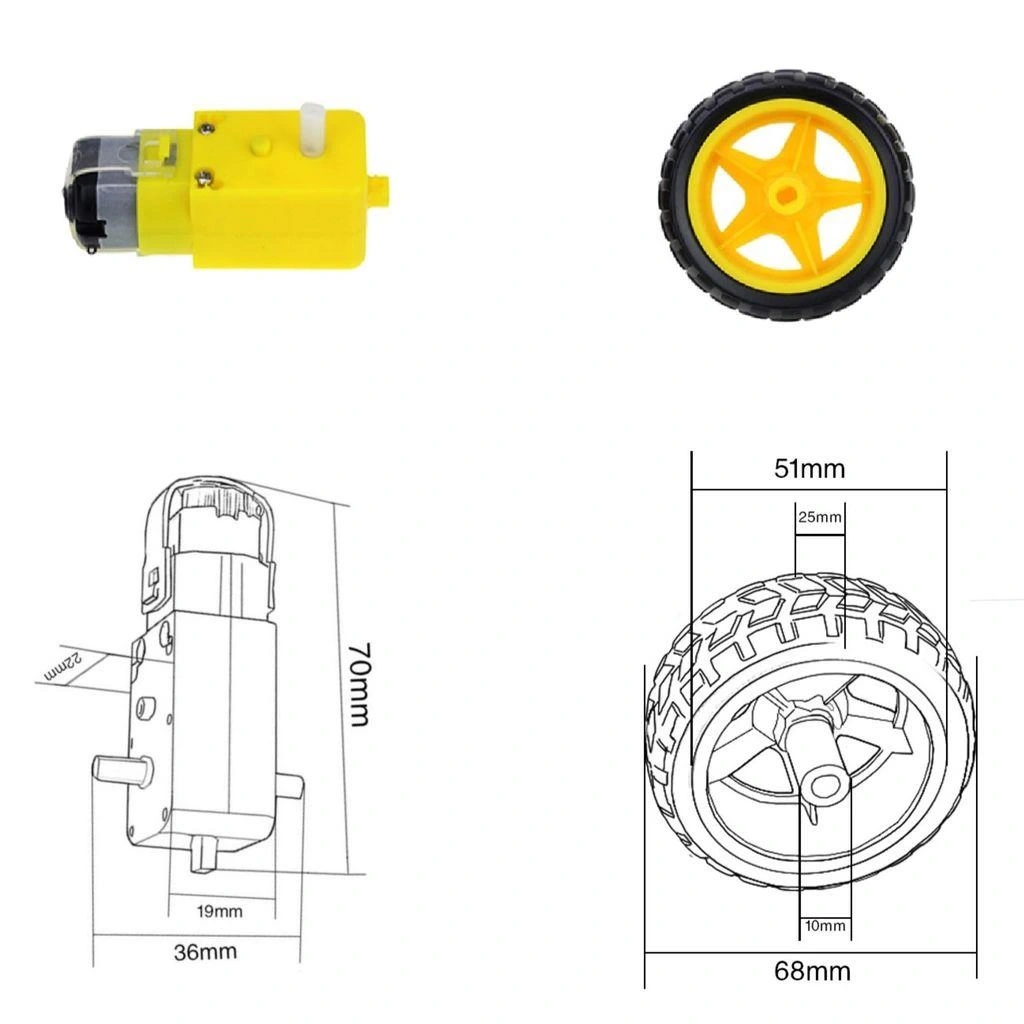
Arduino 6V 250 RPM DC Motor ve Tekerlek Seti
Arduino 6V 250 RPM DC Motor ve Tekerlek Seti, robotik projeler ve hareket kontrol uygulamaları için tasarlanmış, kullanıma hazır bir motor-tekerlek kombosudur. Bu set, 6V çalışma voltajında 250 RPM hız sağlayan yüksek torklu bir DC motor ile doğrudan motor miline monte edilebilen kaliteli plastik tekerleği içerir. Redüktörlü yapısı sayesinde yüksek tork üreten bu motor, robot araçları, küçük otomatik sistemler ve hareket kontrolü gerektiren projeler için ideal bir çözümdür.
Kolay montaj özellikleri ile dikkat çeken bu set, DC motorun dişli kutusu çıkış milinin tekerleğe doğrudan bağlanmasına olanak tanır. Tekerleğin gövdesi dayanıklı plastikten üretilmiş olup, iyi çekiş sağlayan lastik bir dış çepere sahiptir. Motorun kompakt boyutları ve uygun ağırlığı, mini robot ve araç projelerinde kolayca kullanılabilmesini sağlar.
Arduino 6V 250 RPM DC Motor ve Tekerlek Seti, Arduino platformuyla tam uyumludur ve uygun motor sürücü kartları ile kolayca kontrol edilebilir. Servo motorlar gibi hassas konum kontrolü gerektirmeyen, ancak güçlü tork ihtiyacı olan projeler için mükemmel bir çözüm sunar.
Teknik Özellikler
Bu bölümde Arduino 6V 250 RPM DC Motor ve Tekerlek Setinin detaylı teknik özellikleri listelenmektedir.
- Motor Tipi: Redüktörlü DC Motor
- Çalışma Voltajı: 3-6V DC (6V nominal)
- Nominal Hız: 250 RPM (6V'ta)
- Yüksüz Akım Çekişi: Yaklaşık 70mA
- Yüklü Akım Çekişi: Yaklaşık 250-300mA
- Stall (Durma) Akımı: Yaklaşık 800mA
- Tork: ≥ 0.8 kg.cm
- Dişli Oranı: Yaklaşık 48:1
- Motor Çapı: 20mm
- Motor Uzunluğu: Yaklaşık 50mm (dişli kutusu dahil)
- Şaft Çapı: 4mm
- Şaft Uzunluğu: 8mm
- Kablo Uzunluğu: Yaklaşık 15cm
- Tekerlek Çapı: 65mm
- Tekerlek Genişliği: 27mm
- Tekerlek Malzemesi: ABS plastik gövde, kauçuk çeper
- Montaj Tipi: Doğrudan motor miline geçmeli
- Ağırlık: Motor yaklaşık 30g, tekerlek yaklaşık 20g
- Çalışma Sıcaklığı: -10°C ~ +60°C
Bağlantı ve Kullanım
Arduino 6V 250 RPM DC Motor ve Tekerlek Setinin bağlantı şeması ve kullanım talimatları.
İpucu: Arduino 6V DC Motor ve Tekerlek Setini bağlarken, motorun doğrudan Arduino pinlerine bağlanmaması gerektiğini unutmayın. Motorun akım çekişi Arduino pinlerinin kaldırabileceğinden daha yüksektir ve doğrudan bağlantı Arduino'ya zarar verebilir. Her zaman uygun bir motor sürücü devresi veya modülü kullanın. Motor bağlantısı yaparken polariteye dikkat edin; polariteyi değiştirmek motorun dönüş yönünü değiştirecektir. Tekerleği motor miline takarken, aşırı kuvvet uygulamadan, şaftı tekerlek merkezindeki delikle hizalayarak hafif bir bastırma hareketiyle monte edin. Motor ve tekerlek bağlantısının güvenli olduğundan emin olun, gevşek bağlantı titreşime ve performans sorunlarına neden olabilir. Motor sürücü olarak L298N, L293D gibi H-köprü sürücüleri veya TB6612FNG gibi MOSFET tabanlı sürücüler kullanabilirsiniz. 6V nominal voltaj değeri, motorun optimum performans gösterdiği değerdir; kısa sürelerle 7-7.5V'a kadar çalıştırılabilir, ancak uzun süre yüksek voltajda çalıştırmak motor ömrünü kısaltabilir. Düşük voltajlarda (örneğin 3-4.5V) motor daha düşük hızda ve daha az torkla çalışacaktır. Motorun ilk çalıştırma (başlangıç) anında daha yüksek akım çektiğini hesaba katın ve güç kaynağınızı buna göre seçin. İki veya daha fazla motoru aynı anda çalıştırırken, güç kaynağınızın toplam akım ihtiyacını karşılayabileceğinden emin olun. Redüktörlü motorlar yapıları gereği ses çıkarabilir, bu normaldir. Motor uzun süre yüksek yükte kullanılırsa ısınabilir, düzenli olarak soğumasına izin verin ve gerekirse küçük bir soğutucu ekleyin.
Motorun Elektriksel Bağlantısı
DC motorun Arduino ve motor sürücüler ile bağlantısı:
- Temel Bağlantı Şeması:
- Motorun kırmızı (+) ve siyah (-) kabloları
- Motor sürücü bağlantısı (H-Köprü devresi gereklidir)
- Arduino'dan sürücüye kontrol sinyalleri
- L298N Motor Sürücü ile Bağlantı:
- L298N OUT1 ve OUT2 çıkışlarına motor bağlantısı
- Arduino dijital pinlerinden IN1 ve IN2 girişlerine kontrol sinyalleri
- ENA pinine PWM sinyali ile hız kontrolü
- L293D Motor Sürücü Entegresi ile Bağlantı:
- Çıkış pinleri (3,6) veya (11,14) arasına motor bağlantısı
- Giriş pinleri (2,7) veya (10,15) üzerinden kontrol
- Enable pinleri (1,9) ile aktivasyon ve hız kontrolü
Tekerlek Montajı ve Mekanik Kurulum
Tekerleğin motora montajı ve mekanik yapılandırma:
- Tekerlek Montaj Adımları:
- Motor şaftını tekerlek göbeğindeki delikle hizalama
- Tekerleği hafif basınçla şafta yerleştirme
- Tam oturup oturmadığını kontrol etme
- Robot Platformu Montaj Önerileri:
- Motorun sağlam bir şekilde şasiye sabitlenmesi
- Simetrik ağırlık dağılımı için çift motor kullanımı
- Yön kontrolü için uygun şasi tasarımı
- Üçüncü Tekerlek/Destek Seçenekleri:
- Bilyalı döner tekerlek (caster wheel) kullanımı
- Sürtünmesi düşük kayıcı destek
- Üç veya dört tekerlekli tasarım alternatiflerinin değerlendirilmesi
Motor Kontrolü ve Sürüş Teknikleri
Motorun kontrolü için yazılım ve donanım yaklaşımları:
- Arduino Kod Prensipleri:
- digitalWrite() fonksiyonu ile yön kontrolü
- analogWrite() fonksiyonu ile PWM hız kontrolü
- Yumuşak başlatma ve durdurma için rampa fonksiyonları
- Hız Kontrolü Yöntemleri:
- PWM (Pulse Width Modulation) ile hız ayarı
- Farklı PWM frekanslarının etkisi
- Minimum çalışma hızı değerlendirmesi
- Batarya ve Güç Kaynağı Seçimi:
- 4xAA pil (6V) veya 2S LiPo batarya (7.4V) kullanımı
- Regülatörlü güç kaynağı opsiyonları
- Minimum 500-800mA akım sağlayabilen kaynak seçimi
Uygulama Alanları
Arduino 6V 250 RPM DC Motor ve Tekerlek Setinin kullanılabileceği proje ve uygulama örnekleri.
Robot Projeleri
DC motor ve tekerlek setinin robotik uygulamalardaki kullanımı:
- Çizgi İzleyen Robotlar:
- IR sensörlerle çizgi takibi yapan araçlar
- Yarışma amaçlı hızlı çizgi izleyen robotlar
- Eğitim amaçlı giriş seviyesi projeler
- Engelden Kaçan Robotlar:
- Ultrasonik sensör tabanlı engel algılama
- IR mesafe sensörleri ile çevre taraması
- Akıllı rota belirleme algoritmaları
- Uzaktan Kontrollü Araçlar:
- Bluetooth/WiFi kontrollü RC araçlar
- Kameradan görüntü aktaran keşif robotları
- Mobil uygulama ile kontrolü sağlanan projeler
Eğitim Projeleri
Eğitim amaçlı kullanım alanları ve öğrenme projeleri:
- STEM Eğitimi:
- Elektrik, mekanik ve programlama konseptlerini öğretme
- Fizik prensiplerini uygulama (kuvvet, hareket, sürtünme)
- Problem çözme yeteneklerini geliştirme
- Kodlama Öğrenimi:
- Arduino temel programlama eğitimi
- Motor kontrolü üzerinden koşul ve döngü yapılarını öğrenme
- Sensör entegrasyonu ile çevresel farkındalık geliştirme
- Robotik Kulüpleri ve Atölyeler:
- Düşük maliyetli grup projeleri
- Robotik yarışmalarına hazırlık
- Pratik mühendislik becerileri kazanma
Ev ve Hobi Uygulamaları
Ev kullanımı ve hobi projeleri için fikirler:
- Akıllı Ev Cihazları:
- Otomatik perde/jaluzi kontrol sistemleri
- Hareketli güvenlik kameraları
- Uzaktan kontrollü evcil hayvan besleme mekanizmaları
- DIY Oyuncaklar:
- Kişiselleştirilmiş RC oyuncak araçlar
- İnteraktif robotik oyuncaklar
- Eğitici elektronik oyun setleri
- Model Yapımı:
- Hareketli model sergi elemanları
- Küçük ölçekli simülasyon projeleri
- Sanat enstalasyonları ve interaktif sergiler
Arduino Kod Örnekleri
Arduino 6V 250 RPM DC Motor ve Tekerlek Setiyle kullanılabilecek örnek kodlar ve açıklamaları.
Temel Motor Kontrolü
Arduino ile basit motor kontrol kod örnekleri:
- İleri-Geri Kontrol Kodu:
- H-köprü sürücü ile ileri-geri hareket kontrolü
- Belirli sürelerde yön değiştirme
- Yumuşak başlatma ve durdurma fonksiyonu
- PWM ile Hız Kontrolü:
- analogWrite() ile değişken hız uygulaması
- Kademeli hız artırma ve azaltma
- Farklı hız seviyeleri tanımlama
- Çift Motor Senkronizasyonu:
- İki motorun eşzamanlı kontrolü
- Düz, sağa ve sola dönüş fonksiyonları
- Motor hız dengeleme tekniği
Sensör Entegrasyonlu Uygulamalar
Motorun çeşitli sensörlerle birlikte kullanıldığı kodlar:
- Çizgi Takip Algoritması:
- IR sensör verileri ile yön belirleme
- PID kontrol algoritması ile hassas takip
- Farklı çizgi koşullarına adaptasyon
- Ultrasonik Sensör Kontrolü:
- HC-SR04 ile mesafe ölçümü
- Engele yaklaşırken hız azaltma
- Engelden kaçınma manevrası
- Bluetooth/WiFi Kontrol:
- HC-05/ESP8266 ile kablosuz komut alma
- Mobil uygulama ile haberleşme
- Çoklu kontrol modları (manuel/otomatik)
İleri Seviye Uygulamalar
Daha kompleks motor kontrol projeleri için kodlar:
- Otonom Navigasyon:
- Çevresel harita oluşturma algoritması
- Yol planlama ve karar verme mekanizması
- Çoklu sensör verileri ile navigasyon
- Akıllı Hız Kontrolü:
- Batarya durumuna göre performans optimizasyonu
- Yüzey tipi algılama ve hız adaptasyonu
- İvme/eğim sensörleri ile stabilizasyon
- Veri Kaydı ve Analiz:
- Motor performans verilerini toplama
- SD kart veya seri port üzerinden veri kaydı
- Performans grafikleri ve analiz fonksiyonları
Performans Optimizasyonu
Arduino 6V 250 RPM DC Motor ve Tekerlek Setinden maksimum performans alma yöntemleri.
Güç Yönetimi
Optimum güç kaynağı ve enerji verimliliği stratejileri:
- Batarya Seçimi ve Yönetimi:
- Alkalin, NiMH veya LiPo pil seçeneklerinin değerlendirilmesi
- Batarya kapasitesi ve deşarj oranı optimizasyonu
- Düşük voltaj kesme devresi ile batarya koruması
- Voltaj Regülasyonu:
- Sabit voltaj sağlama yöntemleri
- Voltaj düşümünün motor performansına etkisi
- Regülatör verimliliği ve ısı yönetimi
- Enerji Tasarrufu Teknikleri:
- Görev döngüsü optimizasyonu
- Düşük güç modları ve uyku fonksiyonları
- Hareket gerektirmeyen durumlarda motorları kapatma
Mekanik Optimizasyon
Fiziksel kurulum ve mekanik verimliliği artırma yöntemleri:
- Sürtünme Azaltma:
- Uygun yüzey ve zemin seçimi
- Tekerlek ve mekanik parçaların yağlanması
- Yerden yükseklik ve ağırlık dengesinin optimizasyonu
- Titreşim ve Ses Kontrolü:
- Motorların sağlam montajı
- Titreşim emici malzemeler kullanımı
- Dişli ve mekanik bağlantıların düzenli bakımı
- Tekerlek Performansı:
- Farklı zeminlerde çekiş optimizasyonu
- Tekerlek basıncı ve elastikiyeti
- Aşınma kontrolü ve düzenli bakım
Kontrol Algoritmaları
Motor kontrolünün yazılımsal olarak iyileştirilmesi:
- PID Kontrolü:
- Hassas hız ve pozisyon kontrolü
- PID parametrelerinin ayarlanması
- Geri besleme sensörleri ile kapalı çevrim kontrol
- Yumuşak Hareket Profilleri:
- İvmelenme ve yavaşlama rampalarının oluşturulması
- S-eğrisi hareket profilleri ile titreşim azaltma
- Ani yön değişimlerinde momentum yönetimi
- Dengeleme Algoritmaları:
- Çift motor sistemlerinde senkronizasyon
- Motorlar arası performans farklarını kalibre etme
- Yörünge takibi ve sapma düzeltme
Bakım ve Sorun Giderme
Arduino 6V 250 RPM DC Motor ve Tekerlek Setinin bakımı ve sık karşılaşılan sorunların çözümleri.
Temel Bakım Prosedürleri
Motorun ve tekerleğin uzun ömürlü kullanımı için bakım önerileri:
- Düzenli Temizlik:
- Toz ve kirlerin yumuşak fırça ile temizlenmesi
- Tekerlek kısmında biriken kirlerin temizliği
- Dişli ve mekanik kısımlara dikkatli yaklaşım
- Yağlama:
- Dişli kutusu için uygun tip gres yağı
- Aşırı yağlama yapmaktan kaçınma
- 6-12 aylık periyodik yağlama
- Bağlantı Noktalarının Kontrolü:
- Kablo bağlantılarının sağlamlığını kontrol
- Tekerlek-motor bağlantısının düzenli denetimi
- Vida ve montaj elemanlarının sıkılık kontrolü
Yaygın Sorunlar ve Çözümleri
Sık karşılaşılan problemler ve bunların giderilmesi:
- Motor Çalışmıyor:
- Güç kaynağı ve voltaj kontrolü
- Kablo bağlantılarının sağlamlığı
- Motor sürücü devresinin kontrolü
- Düşük Tork/Hız:
- Batarya voltajının düşük olması
- Mekanik sürtünme ve engellerin kontrolü
- Dişli kutusu sorunları veya aşınması
- Anormal Ses ve Titreşim:
- Dişli hasarı veya aşınması
- Gevşek montaj elemanları
- Yabancı cisim veya kir birikimi
Depolama ve Taşıma
Motor ve tekerlek setinin uygun şekilde muhafazası:
- Uzun Süreli Depolama:
- Temiz ve kuru ortamda saklama
- Uzun süreli depolamada bataryaların çıkarılması
- Aşırı sıcaklık ve nemden koruma
- Taşıma Önerileri:
- Darbe ve titreşimden koruyucu ambalaj kullanımı
- Kabloların güvenli şekilde sabitlenmesi
- Tekerlek ve motorun ayrı paketlenmesi
- Yeniden Kullanıma Hazırlama:
- Uzun süre kullanılmayan motorların kontrol prosedürü
- Yeniden montaj öncesi mekanik inceleme
- Kısa test çalıştırmasıyla performans kontrolü
İlgili Ürün Kategorilerimiz
Arduino geliştirme kartları, shield'ler ve aksesuarları ile motor kontrol projelerinizi hayata geçirin. Arduino Uno, Nano, Mega ve diğer tüm modeller için uyumlu elektronik komponentler ve programlama araçları.
Ürünleri İncele →DC motorlardan step motorlara, servo motorlardan sürücü kartlarına kadar tüm hareket kontrol ürünleri. L298N, L293D gibi motor sürücü kartlar ve robotik projeleri için gereken tüm hareket bileşenleri.
Ürünleri İncele →Hassas konum kontrolü gerektiren projeler için mini servo motorlardan yüksek torklu modellere kadar geniş bir servo motor çeşidi. Robot kol, pan-tilt mekanizmaları ve hassas hareket gerektiren tüm uygulamalar için ideal çözümler.
Ürünleri İncele →
Neden Voltaj.Net'ten Almalısınız?
Voltaj.Net, Türkiye'nin güvenilir elektronik komponent tedarikçisi olarak, yüksek kaliteli motor ve robotik ürünlerini uygun fiyatlarla sunmaktadır.
- Kalite Güvencesi: Test edilmiş ve onaylanmış, güvenilir motor ve kontrol bileşenleri.
- Teknik Destek: Ürün seçimi ve kullanımı konusunda uzman desteği.
- Teslimat: Stoktan hızlı gönderim ve takip edilebilir kargo.
- Tamamlayıcı Ürünler: Projeleriniz için gerekli tüm elektronik bileşenler tek yerde.
- Proje Desteği: Robotik ve hareket kontrol projeleri için teknik bilgi ve kaynaklar.
- Uygun Fiyatlar: Kaliteden ödün vermeden rekabetçi fiyatlandırma.
- Adetli Alım
İmkanı: Eğitim kurumları ve büyük projeler için özel fiyatlandırma.
- Garanti: Tüm ürünlerde garanti ve kolay iade imkanı.
Ürün Hakkında Sıkça Sorulan Sorular
Bu motor Arduino'ya doğrudan bağlanabilir mi?
Hayır, bu DC motor doğrudan Arduino'ya bağlanmamalıdır. DC motor 250-300mA çalışma akımı çeker ve bu değer Arduino'nun I/O pinlerinin sağlayabileceği maksimum akımın (40mA) çok üzerindedir. Mutlaka L298N, L293D gibi bir motor sürücü kullanmanız gerekir. Motor sürücü, düşük güçlü Arduino sinyallerini yüksek güçlü motor kontrol sinyallerine dönüştürür ve motorun ihtiyaç duyduğu akımı harici güç kaynağından sağlar.
Motorun hızını nasıl kontrol edebilirim?
Motorun hızını PWM (Pulse Width Modulation) sinyali ile kontrol edebilirsiniz. Arduino'nun analogWrite() fonksiyonu ve motor sürücünün enable pini kullanılarak 0-255 arasında bir değerle hız ayarlanabilir. Düşük değerler daha düşük hız, yüksek değerler daha yüksek hız sağlar. Alternatif olarak besleme voltajını değiştirerek de hız kontrolü yapılabilir; düşük voltaj daha düşük hız demektir.
Bu motorla bir robot ne kadar ağırlık taşıyabilir?
Bu motor 0.8 kg.cm tork değerine sahiptir. İki motorlu bir robot platformunda, düz zeminde yaklaşık 500-700 gram ağırlık taşıyabilir. Taşıma kapasitesi zemin sürtünmesine, batarya voltajına, ağırlık dağılımına ve robot tasarımına bağlıdır. Yüksek verimlilik için motorların nominal yükün %70-80'i civarında çalıştırılması önerilir. Eğimli yüzeylerde taşıma kapasitesi önemli ölçüde düşer.
Motorun pil ömrü ne kadardır?
Pil ömrü, kullanılan pilin kapasitesine ve motorun çektiği akıma bağlıdır. Ortalama çalışma akımı 250mA civarındadır. 2000mAh kapasiteli bir pil ile teorik olarak yaklaşık 8 saat çalışması beklenir. Ancak pratik uygulamalarda start-stop durumları, yük değişimleri ve diğer elektronik bileşenlerin tüketimi nedeniyle bu süre 3-6 saate düşebilir. İki motor kullanıldığında pil ömrü yaklaşık yarıya iner.
Tekerlek motora nasıl monte edilir?
Tekerlek, motorun 4mm çapındaki şaftına geçmeli olarak monte edilir. Tekerleği monte etmek için motor şaftını tekerleğin merkezindeki delikle hizalayın ve hafif bir basınçla yerleştirin. Aşırı kuvvet uygulamayın, motor mili veya dişliler zarar görebilir. Tekerlek tam oturmuyorsa, şaft ile delik arasındaki uyumu kontrol edin. İlave sabitleme için ince bir damla yapıştırıcı kullanılabilir.
Bu motorla çizgi izleyen robot yapabilir miyim?
Evet, bu motor ve tekerlek seti çizgi izleyen robot projeleri için idealdir. 250 RPM hızı, çizgi izleme için uygun bir değerdir. İki motor, uygun bir şasi, IR sensörler, Arduino ve L298N motor sürücü ile basit bir çizgi izleyen robot yapabilirsiniz. Çizgi sensörlerinden gelen verilere göre motorları kontrol eden bir algoritma yazmanız gerekecektir. Başlangıç seviyesi projeler için mükemmel bir seçimdir.
Motor sürekli çalıştığında ısınması normal midir?
Evet, motorun çalışma sırasında ılık veya hafif sıcak olması normaldir. Yüksek yükte veya uzun süreli çalışmada motor gövdesi dokunulduğunda sıcak olabilir. Ancak yanma hissi verecek kadar sıcak olmamalıdır. Aşırı ısınma genellikle aşırı yük, düşük voltaj altında zorlanma veya mekanik bir engel nedeniyle oluşur. Motorun 60°C üzerinde ısınması durumunda kullanımı keserek soğumasını bekleyin.
Motorun dönüş yönünü nasıl değiştirebilirim?
Motorun dönüş yönünü değiştirmek için bağlantı polaritesini tersine çevirmeniz yeterlidir. Kırmızı ve siyah kabloların bağlantı yerlerini değiştirerek motor ters yönde dönecektir. Motor sürücü kullanıyorsanız, Arduino kodunda dijital çıkışların değerlerini değiştirerek (HIGH/LOW durumlarını tersine çevirerek) motorun yönünü programlama yoluyla da kontrol edebilirsiniz. L298N gibi H-köprü sürücüler tam olarak bu amaçla tasarlanmıştır.